Paper:
Function of Bi-Articular Femoral Muscles During the Transition from Sitting to Standing Up
Takuya Koide*
 , Masanobu Manno**, Hiroshi Takahama*, and Tomohiko Fujikawa*
, Masanobu Manno**, Hiroshi Takahama*, and Tomohiko Fujikawa*
*Osaka Electro-Communication University
1130-70 Kiyotaki, Shijonawate, Osaka 575-0063, Japan
**Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan

As the elderly population increases, independent living for the aged has become essential for extending a healthy life expectancy, and this requires the maintenance of mobility for daily activities, such as standing up and walking. Among these, standing up, a series of movements involved in getting out of a chair or bed, is the starting point of daily activities. Therefore, it is important to clarify the factors that contribute to accomplishing the transition from sitting to standing up. This study attempted to clarify the relationship between motor characteristics and the mechanism of muscle activity involved in the change from sitting to standing up. Specifically, we focused on the activity of the bi-articular muscles involved in the two joints simultaneously rather than joint torque that is the conventional standard for evaluating motion. We probed the mechanistic characteristics of bi-articular muscle activity as well as the main muscles that function during normal standing up motion, namely a natural standing up movement where the trunk is not vertically restricted, using electromyographic analysis, theoretical analysis using a link model based on the muscle arrangement of the lower limb, and experimental analysis using an actual model that reproduces the functions of these muscles to define the muscular activities of the thigh muscles.
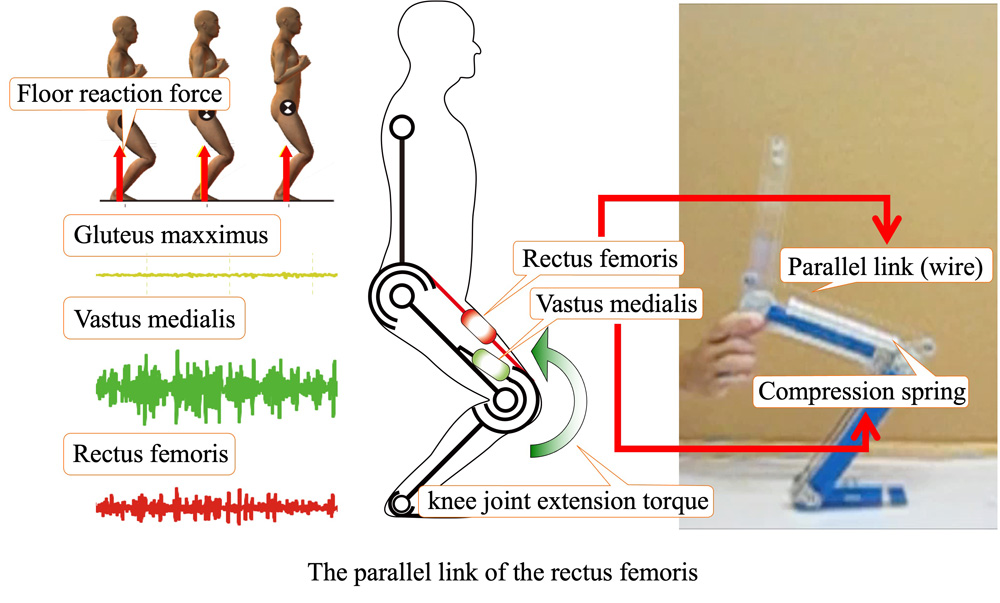
The parallel link of the rectus femoris
- [1] K. Hosoda, M. Uematsu, K. Enishi, and M. Nakae, “Textbook of physical therapy for central nervous system disorders,” Nankodo, 2008 (in Japanese).
- [2] S. Ueda, “Disuse, overuse and misuse and physical therapy in stroke patients: Basic research and clinical studies on disuse, overuse and misuse signs and symptoms,” PT J., Vol.27, No.2, pp. 76-86, 1993 (in Japanese). https://doi.org/10.11477/mf.1551103680
- [3] M. Anan, K. Okumura, N. Kito, and K. Shinkoda, “Effects of variation in cushion thickness on the sit-to-stand motion of elderly people,” J. of Physical Therapy Science, Vol.20, No.1, pp. 51-57, 2008. https://doi.org/10.1589/jpts.20.51
- [4] R. Nozawa and S. Yamamoto, “The relationship of lower limb and trunk movements in sit-to-stand performed by the young and elderly,” J. of Physical Therapy Science, Vol.27, No.1, pp. 31-35, 2012 (in Japanese). https://doi.org/10.1589/rika.27.31
- [5] T. Sato, T. Suzuki, M. Shibuya, and K. Ohnishi, “Body trajectory planning of biped robot based on ZMP,” IEEJ Trans. on Industry Applications, Vol.129, No.7, pp. 738-747, 2009 (in Japanese). https://doi.org/10.1541/ieejias.129.738
- [6] T. Abe, K. Furukawa, T. Fujikawa, and A. Kanai, “Presumption of power in vivo in standing up operation based on muscle coordinate system,” Proc. of the 7th Joint Conf. in Wellbeing Science and Assistive Technology, p. 99, 2009.
- [7] P. J. Millington, B. M. Myklebust, and G. M. Shambes, “Biomechanical analysis of the sit-to-stand motion in elderly persons,” Archives of Physical Medicine and Rehabilitation, Vol.73, No.7, pp. 609-617, 1992. https://doi.org/10.5555/uri:pii:000399939290124F
- [8] N. Hogan, “Impedance control: An approach to manipulation: Part I—Theory,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 1-7, 1985. https://doi.org/10.1115/1.3140702
- [9] N. Hogan, “Impedance control: An approach to manipulation: Part II—implementation,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 8-16, 1985. https://doi.org/10.1115/1.3140713
- [10] N. Hogan, “Impedance control: An approach to manipulation: Part III—Applications,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 17-24, 1985. https://doi.org/10.1115/1.3140701
- [11] T. Fujikawa, T. Oshima, N. Momose, K. Toriumi, and M. Kumamoto, “An adjustable robot arm mechanism with the muscle coordinate system performing contact tasks,” J. of the Japan Society for Precision Engineering, Vol.75, No.8, pp. 1015-1018, 2009 (in Japanese). https://doi.org/10.2493/jjspe.75.1015
- [12] K. Toriumi, T. Oshima, T. Fujikawa, M. Kumamoto, and N. Momose, “Effects of the bi-articular gastrocnemius muscle of human on the jump movement of the model,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.69, No.688, pp. 3263-3268, 2003 (in Japanese). https://doi.org/10.1299/kikaic.69.3263
- [13] H. Elftman, “Biomechanics of muscle: With particular application to studies of gait,” The J. of Bone & Joint Surgery, Vol.48, No.2, pp. 363-377, 1966. https://doi.org/10.2106/00004623-196648020-00017
- [14] I. Nara, M. Kumamoto, Y. Uchiyama, and T. Abe, “Biomechanics of the Diarthrosis Muscle,” pp. 88-138, Igaku-Shoin, 2008.
- [15] R. J. Cannon and E. Cafarelli, “Neuromuscular adaptations to training,” J. of Applied Physiology, Vol.63, No.6, pp. 2396-2402, 1987. https://doi.org/10.1152/jappl.1987.63.6.2396
- [16] F. Hoshi et al., “A kinesiological analysis of rising from a chair,” Physical Therapy Japan, Vol.19, No.1, pp. 43-48, 1992 (in Japanese). https://doi.org/10.15063/rigaku.KJ00001306428
- [17] T. Matsuzawa and K. Eguchi, “Textbook of Physical Therapy Evaluation,” Revised 6th Edition, Kanehara & Co., Ltd., 2018 (in Japanese).
- [18] T. Abe et al., “Parallel linkage function of the rectus femoris when standing up,” J. of the Robotics Society of Japan, Vol.32, No.2, pp. 190-197, 2014 (in Japanese). https://doi.org/10.7210/jrsj.32.190
- [19] T. Koide, M. Manno, H. Takahama, Y. Koshino, and T. Fujikawa, “Simulation analysis of standing up using the bi-joint link model,” Japanese J. of Physical Therapy Fundamentals, Vol.23, No.1, pp. 97-106, 2021 (in Japanese). https://doi.org/10.24780/jptf.23.1_97
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.