Paper:
GREEMA: Proposal and Experimental Verification of Growing Robot by Eating Environmental Material for Landslide Disaster
Yusuke Tsunoda
 , Yuya Sato, and Koichi Osuka
, Yuya Sato, and Koichi Osuka
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

In areas inaccessible to humans, such as the lunar surface and landslide sites, there is a need for multiple autonomous mobile robot systems that can replace human workers. Robots are required to remove water and sediment from landslide sites such as river channel blockages as soon as possible. Conventionally, several construction machines are deployed at civil engineering sites. However, owing to the large size and weight of conventional construction equipment, it is difficult to move multiple units of construction equipment to a site, which results in significant transportation costs and time. To solve such problems, this study proposes GREEMA: growing robot by eating environmental material, which is lightweight and compact during transportation and functions by eating environmental materials once it arrives at the site. GREEMA actively takes in environmental materials, such as water and sediment, uses them as its structure, and removes them by moving itself. In this study, two types of GREEMAs were developed and experimentally verified. First, we developed a fin-type swimming robot that passively takes in water into its body using a water-absorbing polymer and forms a body to express its swimming function. Second, we constructed an arm-type robot that eats soil to increase the rigidity of its body. We discuss the results of these two experiments from the viewpoint of explicit-implicit control and describe the design theory of GREEMA.
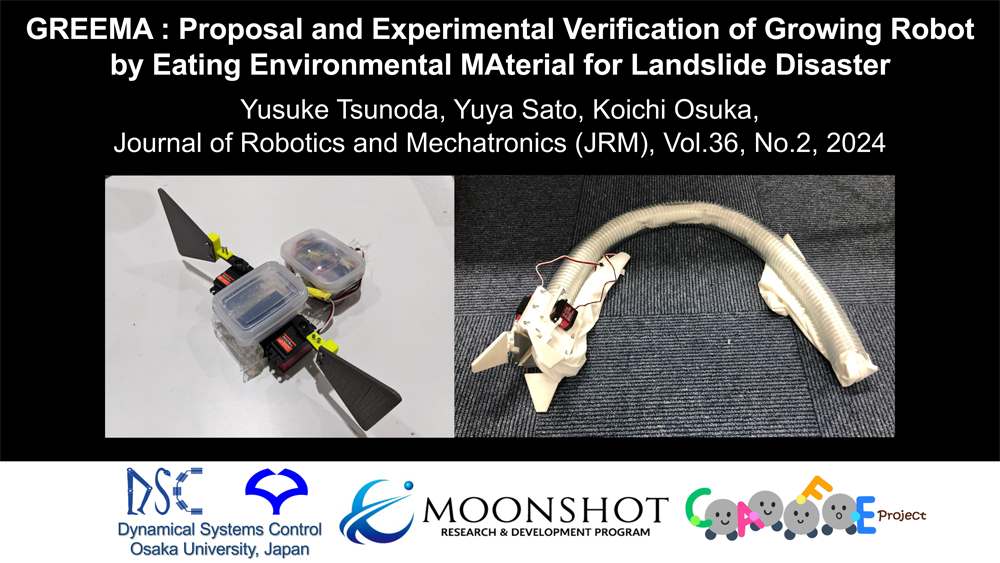
Robot growing by eating water/soil
- [1] F. Akazawa et al., “Numerical simulation of landslide dam deformation by overtopping flow,” Int. J. of Erosion Control Engineering, Vol.7, No.3, pp. 85-91, 2014. https://doi.org/10.13101/ijece.7.85
- [2] H. Zheng et al., “Recent advances in stability and failure mechanisms of landslide dams,” Frontiers in Earth Science, Vol.9, Article No.659935, 2021. https://doi.org/10.3389/feart.2021.659935
- [3] X. Fan et al., “Recent technological and methodological advances for the investigation of landslide dams,” Earth-Science Reviews, Vol.218, Article No.103646, 2021. https://doi.org/10.1016/j.earscirev.2021.103646
- [4] W. Sakurai, “The way of urgent works against large landslide dam,” J. of the Japan Society of Erosion Control Engineering, Vol.71, No.6, pp. 14-20, 2019 (in Japanese). https://doi.org/10.11475/sabo.71.6_14
- [5] H. Sugawara, “Efforts of countermeasures for land slide dam in Kii Mountain District Sabo Office,” J. of the Japan Society of Erosion Control Engineering, Vol.72, No.1, pp. 45-50, 2019 (in Japanese). https://doi.org/10.11475/sabo.72.1_45
- [6] K. Otsu, M. Otsuki, G. Ishigami, and T. Kubota, “Terrain adaptive detector selection for visual odometry in natural scenes,” Advanced Robotics, Vol.27, No.18, pp. 1465-1476, 2013. https://doi.org/10.1080/01691864.2013.843789
- [7] R. P. Mueller et al., “Regolith advanced surface systems operations robot (RASSOR),” 2013 IEEE Aerospace Conf., 2013. https://doi.org/10.1109/AERO.2013.6497341
- [8] K. Nagatani et al., “Innovative technologies for infrastructure construction and maintenance through collaborative robots based on an open design approach,” Advanced Robotics, Vol.35, No.11, pp. 715-722, 2021.
- [9] K. Osuka, A. Ishiguro, X.-Z. Zheng, Y. Sugimoto, and D. Owaki, “Dual structure of mobiligence—Implicit control and explicit control—,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2407-2412, 2010. https://doi.org/10.1109/IROS.2010.5653968
- [10] K. Osuka, A. Ishiguro, X.-Z. Zheng, Y. Sugimoto, and D. Owaki, “Implicit control law embedded in control system solves problem of adaptive function!?,” J. of the Robotics Society of Japan, Vol.28, No.4, pp. 491-502, 2010 (in Japanese). https://doi.org/10.7210/jrsj.28.491
- [11] D.-Y. Lee, S.-R. Kim, J.-S. Kim, J.-J. Park, and K.-J. Cho, “Origami wheel transformer: A variable-diameter wheel drive robot using an origami structure,” Soft Robotics, Vol.4, No.2, pp. 163-180, 2017. https://doi.org/10.1089/soro.2016.0038
- [12] C. H. Belke and J. Paik, “Mori: A modular origami robot,” IEEE/ASME Trans. on Mechatronics, Vol.22, No.5, pp. 2153-2164, 2017. https://doi.org/10.1109/TMECH.2017.2697310
- [13] E. Sihite, A. Kalantari, R. Nemovi, A. Ramezani, and M. Gharib, “Multi-modal mobility morphobot (M4) with appendage repurposing for locomotion plasticity enhancement,” Nature Communications, Vol.14, No.1, Article No.3323, 2023. https://doi.org/10.1038/s41467-023-39018-y
- [14] H. Takanobu, H. Imai, K. Yokota, K. Suzuki, and H. Miura, “A robot that grows like human,” 2009 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 554-559, 2009. https://doi.org/10.1109/AIM.2009.5229953
- [15] D. Ura, M. Iribe, K. Osuka, and T. Kinugasa, “Legged walking robot design applying a behavior of passive dynamic walking – Joint D.O.F. alignment design applying the adaptive function –,” Trans. of the Society of Instrument and Control Engineers, Vol.51, No.5, pp. 329-335, 2015 (in Japanese). https://doi.org/10.9746/sicetr.51.329
- [16] L. H. Blumenschein, M. M. Coad, D. A. Haggerty, A. M. Okamura, and E. W. Hawkes, “Design, modeling, control, and application of everting vine robots,” Frontiers in Robotics and AI, Vol.7, Article No.548266, 2020. https://doi.org/10.3389/frobt.2020.548266
- [17] F. Ilievski, A. D. Mazzeo, R. F. Shepherd, X. Chen, and G. M. Whitesides, “Soft robotics for chemists,” Angewandte Chemie Int. Edition, Vol.50, No.8, pp. 1890-1895, 2011. https://doi.org/10.1002/anie.201006464
- [18] H. Ando et al., “Fire extinguishment using a 4 m long flying-hose-type robot with multiple water-jet nozzles,” Advanced Robotics, Vol.34, No.11, pp. 700-714, 2020. https://doi.org/10.1080/01691864.2020.1769723
- [19] T. Takahashi, M. Watanabe, K. Tadakuma, M. Konyo, and S. Tadokoro, “Retraction mechanism of soft torus robot with a hydrostatic skeleton,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp. 6900-6907, 2020. https://doi.org/10.1109/LRA.2020.3019736
- [20] N. G. Cheng et al., “Design and analysis of a robust, low-cost, highly articulated manipulator enabled by jamming of granular media,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 4328-4333, 2012. https://doi.org/10.1109/ICRA.2012.6225373
- [21] D. Carroll and M. Yim, “Robots made from ice: An analysis of manufacturing techniques,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1933-1938, 2020. https://doi.org/10.1109/IROS45743.2020.9340855
- [22] A. Maekawa et al., “Improvised robotic design with found objects,” 32nd Conf. on Neural Information Processing Systems (NIPS 2018), 2018.
- [23] S. Wilkinson, “‘gastrobots’—Benefits and challenges of microbial fuel cells in foodpowered robot applications,” Autonomous Robots, Vol.9, No.2, pp. 99-111, 2000. https://doi.org/10.1023/A:1008984516499
- [24] I. Ieropoulos, C. Melhuish, and J. Greenman, “Artificial metabolism: Towards true energetic autonomy in artificial life,” Proc. of 7th European Conf. on Artificial Life (ECAL 2003), pp. 792-799, 2003. https://doi.org/10.1007/978-3-540-39432-7_85
- [25] I. Ieropoulos, C. Melhuish, J. Greenman, and I. Horsfield, “EcoBot-II: An artificial agent with a natural metabolism,” Int. J. of Advanced Robotic Systems, Vol.2, No.4, Article No.31, 2005. https://doi.org/10.5772/5777
- [26] H. Philamore, J. Rossiter, A. Stinchcombe, and I. Ieropoulos, “Row-bot: An energetically autonomous artificial water boatman,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3888-3893, 2015. https://doi.org/10.1109/IROS.2015.7353924
- [27] K. Ueno, T. Satomi, and H. Takahashi, “Suppression of swelling and deterioration of fiber-cement-stabilized soil containing super absorbent polymer using ferric chloride,” Japanese J. of JSCE, Vol.79, No.7, Article No.22-00251, 2023 (in Japanese). https://doi.org/10.2208/jscejj.22-00251
- [28] M. Fujita et al., “Jamming layered membrane gripper mechanism for grasping differently shaped-objects without excessive pushing force for search and rescue missions,” Advanced Robotics, Vol.32, No.11, pp. 590-604, 2018. https://doi.org/10.1080/01691864.2018.1451368
- [29] S. E. Root et al., “Bio-inspired design of soft mechanisms using a toroidal hydrostat,” Cell Reports Physical Science, Vol.2, No.9, Article No.100572, 2021. https://doi.org/10.1016/j.xcrp.2021.100572
- [30] H. Zang et al., “Bionic torus as a self-adaptive soft grasper in robots,” Applied Physics Letters, Vol.116, No.2, Article No.023701, 2020. https://doi.org/10.1063/1.5128474
- [31] H. Li et al., “A bioinspired soft swallowing robot based on compliant guiding structure,” Soft Robotics, Vol.7, No.4, pp. 491-499, 2020. https://doi.org/10.1089/soro.2018.0154
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.