Paper:
Study of Force Control for Construction Automation
Toshifumi Hiramatsu*, Miyuki Saiki*, Naohiro Hara*, Masaki Yamada*, and Hisashi Sugiura*,**

*YANMAR Holdings Co., Ltd.
2481 Umegahara, Maibara, Shiga 521-8511, Japan
**Kyushu Institute of Technology
2-4 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0196, Japan

Automatic operation is one of the main research topics in the field of construction for solving labor shortages. However, workers still perform manual work at construction sites and there is an urgent need to automate this. To automate manual work at construction sites, construction machinery requires force control that absorbs external shock impact forces and provides appropriate forces along with environmental forces. In this study, the boom/arm/bucket joints of a 0.06 m3 class excavator were electrically driven, and a series elastic actuator (SEA) was applied to satisfy these two requirements. There are few examples of SEA studies on its application in large machines with high outputs, such as excavators. We designed the structure of the SEA, conducted the control design, and fabricated an actual bench simulating a 0.06 m3 class excavator to verify its performance. The results of the bench tests show that our SEA system achieves a control accuracy and responsiveness suitable for use in manual work.
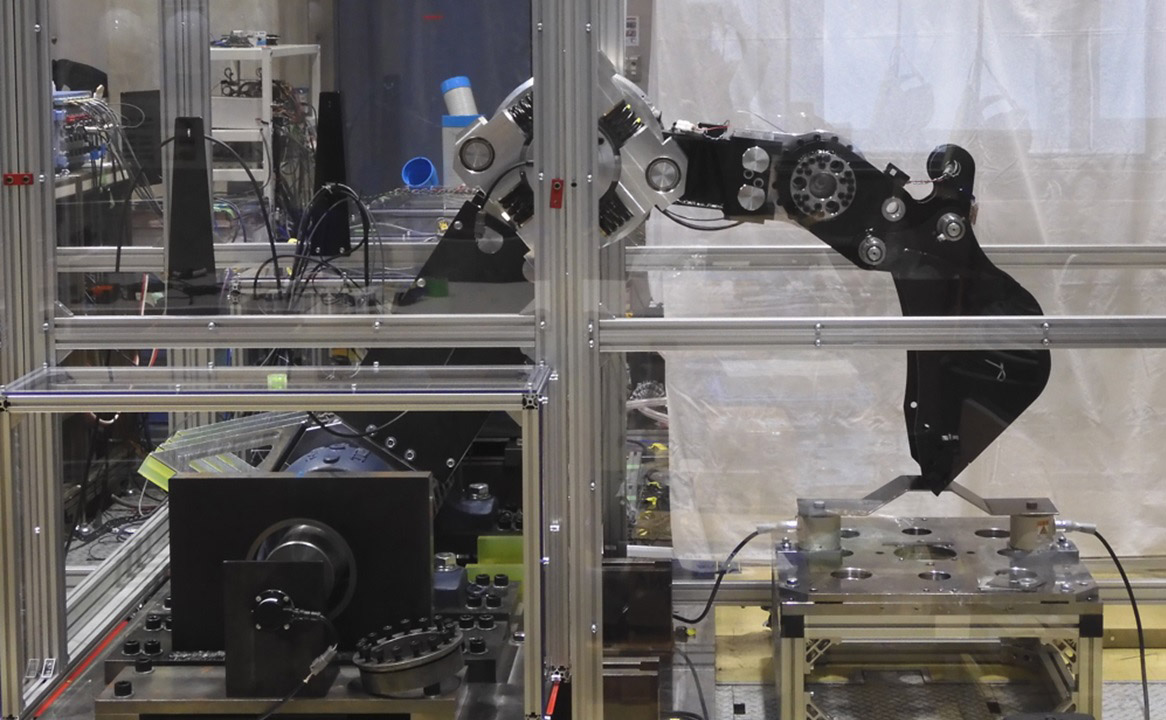
Three-joint with SEA implemented test bench simulating an excavator
- [1] K. Tateyama, “Achievement and Future Prospects of ICT Construction in Japan,” J. Robot. Mechatron., Vol.28, No.2, pp. 123-128, 2016. https://doi.org/10.20965/jrm.2016.p0123
- [2] J. Takahashi, S. Fujimori, K. Takahashi, T. Hasegawa, Y. Honda, N. Hanasaki, Y. Hijioka, and T. Masui, “Limited Role of Working Time Shift in Offsetting the Increasing Occupational-Health Cost of Heat Exposure,” Earth’s Future, Vol.6, pp. 1588-1602, 2018. https://doi.org/10.1029/2018EF000883
- [3] S. Tsuneyama, S. Takeshita, H. Tsutsumi, and M. Shirosawa, “The practical usage of i-Construction for enhancing the safety of the construction site,” J. of Japan Society of Civil Engineers, Ser. F6 (Safety Problem), Vol.73, No.2, pp. I1-I6, 2017 (in Japanese). https://doi.org/10.2208/jscejsp.73.I_1
- [4] T. Bock, “Construction Robotics,” J. Robot. Mechatron., Vol.28, No.2, pp. 116-122, 2016. https://doi.org/10.20965/jrm.2016.p0116
- [5] G. Carra, A. Argiolas, A. Bellisima, M. Niccolini, and M. Ragaglia, “Robotics in the Construction Industry: State of the Art and Future Opportunities,” Proc. of the 35th Int. Symposium on Automation and Robotics in Construction (ISARC), pp. 866-873, 2018. https://doi.org/10.22260/ISARC2018/0121
- [6] M. Kamezaki, H. Iwata, and S. Sugano, “Identification of Dominant Error Force Component in Hydraulic Pressure Reading for External Force Detection in Construction Manipulator,” J. Robot. Mechatron., Vol.24, No.1, pp. 95-104, 2012. https://doi.org/10.20965/jrm.2012.p0095
- [7] H. Muramoto, K. Tomita, and T. Morita, “Compliance Analysis of Construction Machinery Front by Direct Stiffness Method,” J. Robot. Mechatron., Vol.20, No.3, pp. 481-489, 2008. https://doi.org/10.20965/jrm.2008.p0481
- [8] H. Kaminaga, J. Ono, Y. Nakashima, and Y. Nakamura, “Development of Backdrivable Hydraulic Joint Mechanism for Knee Joint of Humanoid Robots,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 1577-1582, 2009. https://doi.org/10.1109/ROBOT.2009.5152866
- [9] T. Sandy, M. Giftthaler, K. Dorfler, M. Kohler, and J. Buchli, “Autonomous repositioning and localization of an in situ fabricator,” 2016 IEEE/RSJ Int. Conf. on Robotics and Automation (ICRA), 2016. https://doi.org/10.1109/ICRA.2016.7487449
- [10] G. A. Pratt and M. M. Williamson, “Series elastic actuators,” Proc. of the 1995 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, 1995. https://doi.org/10.1109/IROS.1995.525827
- [11] Y. Kawashima, M. Kinoshita, N. Takasugi, K. Sugimoto, T. Kai, T. Kito, A. Sakamoto, K. Nagasaka, and Y. Kawanami, “Tachyon: Design and control of high payload, robust, and dynamic quadruped robot with series-parallel elastic actuators,” 2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2021. https://doi.org/10.1109/IROS51168.2021.9636196
- [12] R. Fukui, Y. Kusakabe, R. Ikeura, and S. Hayakawa, “Impedance Control Considering Velocity Saturation of a Series Elasticity System with a Motor,” J. Robot. Mechatron., Vol.33, No.4, pp. 833-842, 2021. https://doi.org/10.20965/jrm.2021.p0833
- [13] S. Sugano, H. Iwata, and T. Sugaiwa, “Compliant Manipulation by Human-Symbiotic-Robot TWENDY-ONE,” J. of the Robotics Society of Japan, Vol.31, No.4, pp. 347-352, 2013 (in Japanese). https://doi.org/10.7210/jrsj.31.347
- [14] N. Paine, J. S. Mehling, J. Holley, N. A. Radford, G. Johnson, C. L. Fok, and L. Sentis, “Actuator Control for the NASA-JSC Valkyrie Humanoid Robot: A Decoupled Dynamics Approach for Torque Control of Series Elastic Robots,” J. of Field Robotics, Vol.32, pp. 378-396, 2014. https://doi.org/10.1002/rob.21556
- [15] S. Monteleone, F. Negrello, G. Grioli, and M. G. Catalano, “dSEDA: a differential series elastic damped actuator,” 2022 IEEE/RSJ Int. Conf. on Robotics and Automation (ICRA), 2022. https://doi.org/10.1109/ICRA46639.2022.9811727
- [16] M. Ikeda, R. Niiyama, and Y. Kuniyoshi, “Proposal of Manufacturing Method for New Passive Elastic Joint and Prototype of Human Phantom,” J. Robot. Mechatron., Vol.34, No.2, pp. 402-412, 2022. https://doi.org/10.20965/jrm.2022.p0402
- [17] K. Kurihara, H. Naka, Y. Shitara, and H. Itani, “Study of full electric mini excavator,” Komatsu Technical Report, Vol.68, No.175, pp. 2-7, 2022.
- [18] N. Paine, S. Oh, and L. Sentis, “Design and Control Considerations for High-Performance Series Elastic Actuators,” IEEE/ASME Trans. on Mechatoronics, Vol.19, No.3, pp. 1080-1091, 2013. https://doi.org/10.1109/TMECH.2013.2270435
- [19] K. Haninger, J. Lu, and M. Tomizuka, “Motion control of series-elastic actuators,” 2016 American Control Conf., 2016. https://doi.org/10.1109/ACC.2016.7525610
- [20] A. Argiolas, S. Casini, K. Fujio, T. Hiramatsu, S. Morita, M. Ragaglia, H. Sugiura, and M. Niccolini, “Design, Development and Validation of a Dynamic Fall Prediction System for Excavators,” 2021 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 8523-8529, 2021. https://doi.org/10.1109/ICRA48506.2021.9560796
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.