Paper:
Demonstration of Autonomous Driving Control for a Retrofitted Wheel Loader
Tomohito Kawabe*, Masahiro Inagawa*
 , Toshinobu Takei**,†
, Hiroto Murayama*, Keiichi Yoshizawa*, Munehiro Ishibashi*, and Keiji Nagatani***
, Toshinobu Takei**,†
, Hiroto Murayama*, Keiichi Yoshizawa*, Munehiro Ishibashi*, and Keiji Nagatani***
*Hirosaki University
3 Bunkyo-cho, Hirosaki-city, Aomori 036-8561, Japan
**Seikei University
3-3-1 Kichijoji Kitamachi, Musashino-city, Tokyo 180-8633, Japan
†Corresponding author
***The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

Most research on automating gravel pile transport using wheel loaders has been performed primarily through simulations. Thus, studies should evaluate the usefulness of automatic gravel pile transportation by demonstrating it with an actual wheel loader. This study demonstrates automatic driving control using a retrofitted 3-ton wheel loader for gravel pile transportation. The driving model of a retrofitted wheel loader, in which multiple control systems are interlocked, is considered a simple control model with one input and one output for the pedal and vehicle velocity as well as for the steering wheel and steering angular velocity. In this study, we propose a simple and practical method for constructing a driving model via simple response analysis using an actual machine by constructing a feedforward control model based on control input/output using step responses. In this study, feedforward control was applied to the translation of the vehicle, which has a large dead time. By generating the path following the target point from the vehicle predicted position after the dead time from the driving model, the appropriate control input value calculation considering the dead time was performed. By applying the proposed method to a retrofitted wheel loader in a real environment and evaluating the control performance through control experiments, the effectiveness of the proposed method in practice was demonstrated.
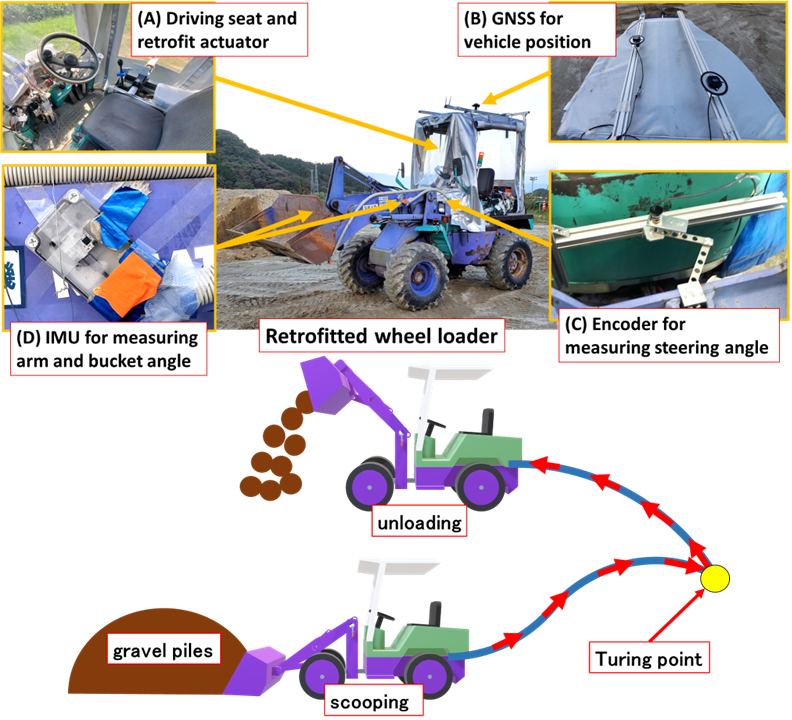
Automation of actual wheel loader in the field
- [1] S. Dadhich, U. Bodin, and U. Andersson, “Key challenges in automation of earth-moving machines,” Automation in Construction, Vol.68, pp. 212-222, 2016. https://doi.org/10.1016/j.autcon.2016.05.009
- [2] O. M. U. Eraliev, K.-H. Lee, D.-Y. Shin, and C.-H. Lee, “Sensing, perception, decision, planning and action of autonomous excavators,” Automation in Construction, Vol.141, Article No.104428, 2022. https://doi.org/10.1016/j.autcon.2022.104428
- [3] B. Alshaer, T. T. Darabseh, and M. A. Alhanouti, “Path planning, modeling and simulation of an autonomous articulated heavy construction machine performing a loading cycle,” Applied Mathematical Modelling, Vol.37, No.7, pp. 5315-5325, 2013. https://doi.org/10.1016/j.apm.2012.10.042
- [4] B. Hong and X. Ma, “Path optimization for a wheel loader considering construction site terrain,” Proc. of the 2018 IEEE Intelligent Vehicles Symp. (IV), pp. 2098-2103, 2018. https://doi.org/10.1109/IVS.2018.8500447
- [5] T. Kawabe, T. Takei, and E. Imanishi, “Path planning to expedite the complete transfer of distributed gravel piles with an automated wheel loader,” Advanced Robotics, Vol.35, No.23, pp. 1418-1437, 2021. https://doi.org/10.1080/01691864.2021.2008488
- [6] J. Shi, D. Sun, D. Qin, M. Hu, Y. Kan, K. Ma, and R. Chen, “Planning the trajectory of an autonomous wheel loader and tracking its trajectory via adaptive model predictive control,” Robotics and Autonomous Systems, Vol.131, Article No.103570, 2020. https://doi.org/10.1016/j.robot.2020.103570
- [7] R. Song, Z. Ye, L. Wang, T. He, and L. Zhang, “Autonomous Wheel Loader Trajectory Tracking Control Using LPV-MPC,” Proc. of the 2022 American Control Conf. (ACC), pp. 2063-2069, 2022. https://doi.org/10.23919/ACC53348.2022.9867662
- [8] E. Halbach, A. Kolu, and R. Ghabcheloo, “Automated Pile Transfer Work Cycles with a Robotic Wheel Loader,” Proc. of the 17th Int. Conf. on Computing in Civil and Building Engineering (ICCCBE), 2018.
- [9] N. Koyachi and S. Sarata, “Unmanned loading operation by autonomous wheel loader,” Proc. of the 2009 ICCAS-SICE, pp. 2221-2225, 2009.
- [10] T. Komatsu, “Development of Remote Controlled Robot with Pneumatic Artificial Rubber Muscles for Hydraulic Excavator,” J. of the Robotics Society of Japan, Vol.38, No.7, pp. 592-595, 2020 (in Japanese). https://doi.org/10.7210/jrsj.38.592
- [11] T. Komatsu, Y. Konno, S. Kiribayashi, K. Nagatani, T. Suzuki, K. Ohno, T. Suzuki, N. Miyamoto, Y. Shibata, and K. Asano, “Autonomous Driving of Six-Wheeled Dump Truck with a Retrofitted Robot,” G. Ishigami and K. Yoshida (Eds.), “Field and Service Robotics,” pp. 59-72, Springer Singapore, 2021. https://doi.org/10.1007/978-981-15-9460-1_5
- [12] T. Komatsu, K. Nagatani, Y. Hirata, T. Suzuki, and K. Ohno, “Velocity Control of Pneumatic Motor Attached to Retrofit-Type Steering Handle for Autonomous Navigation of Conventional Six-Wheeled Dump Truck,” Trans. of the Society of Instrument and Control Engineers, Vol.57, No.10, pp. 433-444, 2021. https://doi.org/10.9746/sicetr.57.433
- [13] D. Endo, G. Yamauchi, and T. Hashimoto, “Development of control methods for automation of remote hydraulic shovels,” FY2021 Construction Work and Construction Machinery Symp., 2021 (in Japanese).
- [14] T. Taguchi, M. Yamashita, S. Yamamoto, and K. Hara, “Development of Wheel Loader—Remote Operation System,” Nishimatsu Construction Technical Report, Vol.45, 2022.
- [15] R. C. Coulter, “Implementation of the Pure Pursuit Path Tracking Algorithm,” Technical Report, CMU-RI-TR-92-01, Carnegie Mellon University, 1992.
- [16] T. Fraichard and A. Scheuer, “From Reeds and Shepp’s to continuous-curvature paths,” IEEE Trans. on Robotics, Vol.20, No.6, pp. 1025-1035, 2004. https://doi.org/10.1109/TRO.2004.833789
- [17] J. Petereit, T. Emter, C. W. Frey, T. Kopfstedt, and A. Beutel, “Application of Hybrid A* to an Autonomous Mobile Robot for Path Planning in Unstructured Outdoor Environments,” Proc. of 7th German Conf. on Robotics (ROBOTIK 2012), 2012.
- [18] J. A. Reeds and L. A. Shepp, “Optimal paths for a car that goes both forwards and backwards,” Pacific J. of Mathematics, Vol.145, No.2, pp. 367-393, 1990. http://doi.org/10.2140/pjm.1990.145.367
- [19] T. Hoshi and T. Takei, “Simultaneous determination of optimized one unloading point and plural scooping points for wheel loader,” Proc. of the 2015 IEEE/SICE Int. Symp. on System Integration (SII), pp. 865-870, 2015. https://doi.org/10.1109/SII.2015.7405113
- [20] T. Takei, T. Hoshi, S. Sarata, and T. Tsubouchi, “Simultaneous determination of an optimal unloading point and paths between scooping points and the unloading point for a wheel loader,” Proc. of the 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5923-5929, 2015. https://doi.org/10.1109/IROS.2015.7354219
- [21] M Quigley, K. Conley, B. Gerkey, J. Faust, T. Foote, J. Leibs, R. Wheeler, and A. Y. Ng, “ROS: an open-source Robot Operating System,” ICRA Workshop on Open Source Software, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.