Paper:
Development of Unmanned Remote System to Find Radiation Sources Based on 4π Gamma Imaging
Atsushi Mukai*1
 , Minato Kanda*1, Kenji Shimazoe*2
, Fumihiko Ishida*3
, Eiji Takada*3
, Yusuke Tamura*4
, Hanwool Woo*5
, Hiroyuki Takahashi*2
, Mizuki Uenomachi*6
, Hajime Asama*7
, Jun Kawarabayashi*8
, Kosuke Tanabe*9
, Ken’ichi Tsuchiya*9, Kei Kamada*10
, and Hideki Tomita*1
, Minato Kanda*1, Kenji Shimazoe*2
, Fumihiko Ishida*3
, Eiji Takada*3
, Yusuke Tamura*4
, Hanwool Woo*5
, Hiroyuki Takahashi*2
, Mizuki Uenomachi*6
, Hajime Asama*7
, Jun Kawarabayashi*8
, Kosuke Tanabe*9
, Ken’ichi Tsuchiya*9, Kei Kamada*10
, and Hideki Tomita*1
*1Department of Energy Engineering, Graduate School of Engineering, Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
*2Department of Nuclear Engineering and Management, School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
*3National Institute of Technology, Toyama College
13 Hongo-machi, Toyama, Toyama 939-8630, Japan
*4Department of Robotics, Graduate School of Engineering, Tohoku University
6-6-1 Aramaki Aza-Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan
*5Department of Mechanical Systems Engineering, School of Engineering, Kogakuin University
2665-1 Nakano-machi, Hachioji, Tokyo 192-0015, Japan
*6Unit of Synergetic Studies for Space, Kyoto University
Kitashirakawa-Oiwakecho, Sakyo-ku, Kyoto, Kyoto 606-8317, Japan
*7Department of Precision Engineering, School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
*8Department of Nuclear Safety Engineering, Faculty of Science and Engineering, Tokyo City University
1-28-1 Tamazutsumi, Setagaya-ku, Tokyo 158-8557, Japan
*9National Research Institute of Police Science
6-3-1 Kashiwanoha, Kashiwa, Chiba 277-0882, Japan
*10New Industry Creation Hatchery Center, Tohoku University
6-6-10 Aramaki Aza-Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan

A prototype system based on a combination of 4π sensitive gamma imaging and simultaneous localization and mapping (SLAM) was developed to find unknown radiation source(s) rapidly. The system consisted of a spherical visible camera, a three-dimensional light detection and ranging, a CdTe pixel array detector for 4π gamma imaging, a portable battery, and a control laptop personal computer; these were mounted on an unmanned vehicle. In a search area of 16 × 16 m2 with a height of 3 m, the prototype system successfully demonstrated the finding of a 137Cs point source with an activity of 0.67 MBq in the surrounding thin walls.
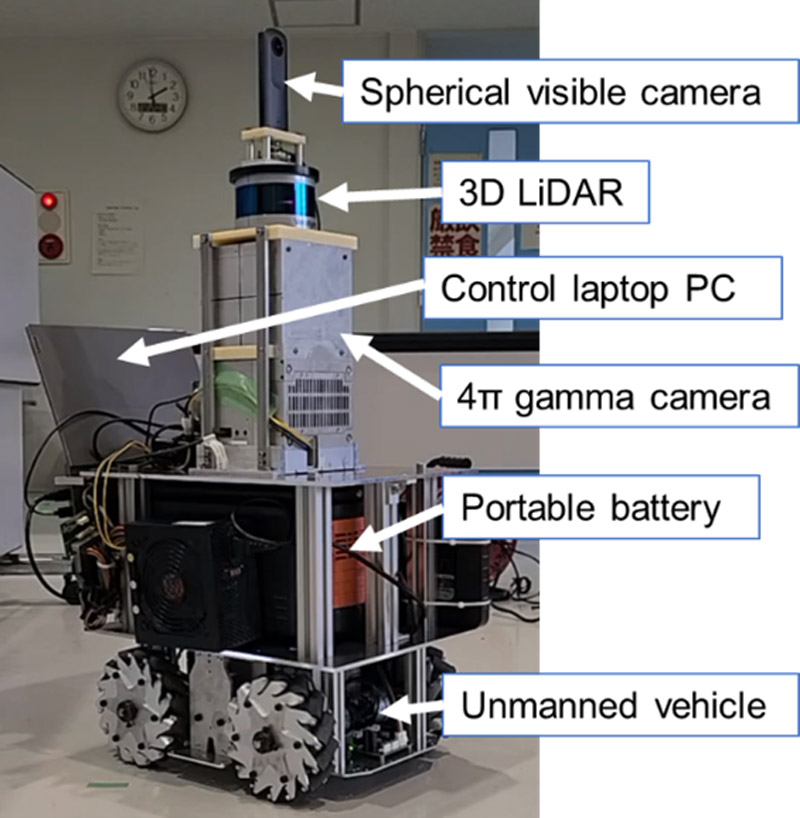
Prototype system using 4π gamma camera
- [1] K. Suzuki and K. Kawabata, “Development of a robot simulator for decommissioning tasks utilizing remotely operated robots,” J. Robot. Mechatron., Vol.32, No.6, pp. 1292-1300, 2020. https://doi.org/10.20965/jrm.2020.p1292
- [2] Y. Kobayashi, S. Kanai, C. Kikumoto, and K. Sakoda, “Design and fabricate of reconnaissance robots for nuclear power plants that underwent accidents,” J. Robot. Mechatron., Vol.34, No.3, pp. 523-526, 2022. https://doi.org/10.20965/jrm.2022.p0523
- [3] M. K. Sharma, A. B. Alajo, and H. K. Lee, “Three-dimensional localization of low activity gamma-ray sources in real-time scenarios,” Nucl. Instrum. Methods Phys. Res. A: Accel. Spectrom. Detect. Assoc. Equip., Vol.813, pp. 132-138, 2016. https://doi.org/10.1016/j.nima.2016.01.001
- [4] M. J. Cieślak, K. A. A. Gamage, and R. Glover, “Coded-aperture imaging systems: Past, present and future development – A review,” Radiat. Meas., Vol.92, pp. 59-71, 2016. https://doi.org/10.1016/J.RADMEAS.2016.08.002
- [5] G. W. Phillips, “Gamma-ray imaging with Compton cameras,” Nucl. Instrum. Methods Phys. Res. B: Beam Interact. Mater. At., Vol.99, Nos.1-4, pp. 674-677, 1995. https://doi.org/10.1016/0168-583X(95)80085-9
- [6] D. Hellfeld et al., “Free-moving quantitative gamma-ray imaging,” Sci. Rep., Vol.11, No.1, Article No.20515, 2021. https://doi.org/10.1038/s41598-021-99588-z
- [7] Y. Sato et al., “Radiation imaging using a compact Compton camera mounted on a crawler robot inside reactor buildings of Fukushima Daiichi Nuclear Power Station,” J. Nucl. Sci. Technol., Vol.56, Nos.9-10, pp. 801-808, 2019. https://doi.org/10.1080/00223131.2019.1581111
- [8] H. S. Lee, J. H. Kim, J. Lee, and C. H. Kim, “Design and performance prediction of large-area hybrid gamma imaging system (LAHGIS) for localization of low-level radioactive material,” Nucl. Eng. Technol., Vol.53, No.4, pp. 1259-1265, 2021. https://doi.org/10.1016/j.net.2020.09.008
- [9] T. Takahashi, J. Kawarabayashi, H. Tomita, T. Iguchi, and E. Takada, “Development of omnidirectional gamma-imager with stacked scintillators,” 2013 3rd Int. Conf. Adv. Nucl. Instrum. Meas. Methods Their Appl. (ANIMMA), 2013. https://doi.org/10.1109/ANIMMA.2013.6728078
- [10] Y. Fuwa et al., “Crystal identification in stacked GAGG scintillators for 4π direction sensitive gamma-ray imager,” Proc. Int. Symp. Radiat. Detect. Their Uses (ISRD2016), Article No.070005, 2016. https://doi.org/10.7566/JPSCP.11.070005
- [11] K. Uema et al., “4π Compton gamma imaging toward determination of radioactivity,” Proc. 2nd Int. Symp. Radiat. Detect. Their Uses (ISRD2018), Article No.011016, 2019. https://doi.org/10.7566/JPSCP.24.011016
- [12] H. Tomita et al., “Gamma-ray source identification by a vehicle-mounted 4π Compton imager,” 2020 IEEE/SICE Int. Symp. Syst. Integr. (SII), pp. 18-21, 2020. https://doi.org/10.1109/SII46433.2020.9025865
- [13] A. Mukai et al., “Simplified image reconstruction method in 4π Compton imaging for radioactive source identification,” 2021 IEEE/SICE Int. Symp. Syst. Integr. (SII), pp. 105-109, 2021. https://doi.org/10.1109/IEEECONF49454.2021.9382624
- [14] H. Tomita et al., “Path-planning system for radioisotope identification devices using 4π gamma imaging based on random forest analysis,” Sensors, Vol.22, No.12, Article No.4325, 2022. https://doi.org/10.3390/s22124325
- [15] A. Mukai et al., “Optimization of detector movement algorithm using decision trees analysis for radiation source identification based on 4π gamma imaging,” 2022 IEEE/SICE Int. Symp. Syst. Integr. (SII), pp. 1026-1029, 2022. https://doi.org/10.1109/SII52469.2022.9708756
- [16] K. M. Górski et al., “HEALPix: A framework for high-resolution discretization and fast analysis of data distributed on the sphere,” Astrophys. J., Vol.622, No.2, pp. 759-771, 2005. https://doi.org/10.1086/427976
- [17] A. Mukai et al., “Application of spherical harmonic filtering to 4π gamma imaging,” Jpn. J. Appl. Phys., Vol.63, No.1, Article No.016002, 2024. https://doi.org/10.35848/1347-4065/ad1143
- [18] T. Shan and B. Englot, “LeGO-LOAM: Lightweight and ground-optimized lidar odometry and mapping on variable terrain,” 2018 IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), pp. 4758-4765, 2018. https://doi.org/10.1109/IROS.2018.8594299
- [19] K. Adachi, M. Kajino, Y. Zaizen, and Y. Igarashi, “Emission of spherical cesium-bearing particles from an early stage of the Fukushima nuclear accident,” Sci. Rep., Vol.3, No.1, Article No.2554, 2013. https://doi.org/10.1038/srep02554
- [20] A. Rump et al., “Estimation of radiation-induced health hazards from a ‘dirty bomb’ attack with radiocesium under different assault and rescue conditions,” Mil. Med. Res., Vol.8, No.1, Article No.65, 2021. https://doi.org/10.1186/s40779-021-00349-w
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.