Paper:
Experimental Evaluation of Manipulator Teleoperation System Based on Trajectory Planning for Obstacle Removal Task in Nuclear Plant Decommissioning
Tatsuya Hashimoto*, Yuichi Tazaki**, Fumiya Matsuda**, Katsumasa Kitajima*, Hikaru Nagano**
 , and Yasuyoshi Yokokohji**
, and Yasuyoshi Yokokohji**
*Mitsubishi Heavy Industries, Ltd.
1-1-1 Wadasaki-cho, Hyogo-ku, Kobe, Hyogo 652-8585, Japan
**Kobe University
1-1 Rokkodai-cho, Nada-ku, Kobe, Hyogo 657-8501, Japan

In the teleoperation system of a dual-arm manipulator developed to retrieve fuel debris and reactor interior structures at the Fukushima Daiichi Nuclear Power Plant, we used software in which an obstacle avoidance function (trajectory planning) was implemented to conduct a mock test simulating obstacle removal operations in narrow spaces. The test results confirmed the validity of the obstacle avoidance function, the executability of a series of necessary tasks, and the improved operability. In addition, issues were identified using the test data.
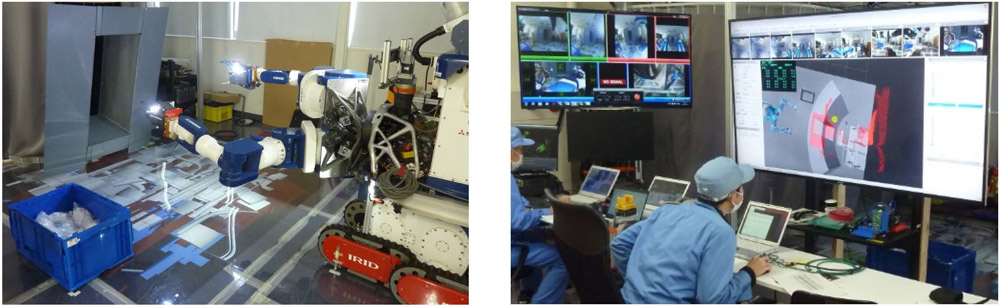
Mock test for obstacle removal operations
- [1] Y. Yokokohji, “The Use of Robots to Respond to Nuclear Accidents: Applying the Lessons of the Past to the Fukushima Daiichi Nuclear Power Station,” Annual Review of Control, Robotics, and Autonomous Systems, Vol.4, pp. 681-710, 2021. https://doi.org/10.1146/annurev-control-071420-100248
- [2] P. Schmaus, D. Leidner, T. Krüger et al., “Preliminary Insights from the METERON SUPVIS Justin Space-Robotics Experiment,” IEEE Robotics and Automation Letters, Vol.3, No.4, pp. 3836-3843, 2018. https://doi.org/10.1109/LRA.2018.2856906
- [3] P. Schmaus, D. Leidner, T. Krüger et al., “Knowledge Driven Orbit-to-Ground Teleoperation of a Robot Coworker,” IEEE Robotics and Automation Letters, Vol.5, No.1, pp. 143-150, 2020. https://doi.org/10.1109/LRA.2019.2948128
- [4] G. R. Cho, G. Ki, M.-J. Lee et al., “Experimental Study on Tele-Manipulation Assistance Technique Using a Touch Screen for Underwater Cable Maintenance Tasks,” J. of Marine Science and Engineering, Vol.9, No.5, Article No.483, 2021. https://doi.org/10.3390/jmse9050483
- [5] M. D. Johnston and K. J. Rabe, “Integrated Planning for Telepresence with Time Delays,” Proc. of the 2nd IEEE Int. Conf. on Space Mission Challenges for Information Technology (SMC-IT’06), 2006. https://doi.org/10.1109/SMC-IT.2006.39
- [6] N. Alunni, C. Phillips-Grafflin, H. B. Suay et al., “Toward a User-guided Manipulation Framework for High-DOF Robots with Limited Communication,” Proc. of the 2013 IEEE Conf. on Technologies for Practical Robot Applications (TePRA), 2013. https://doi.org/10.1109/TePRA.2013.6556356
- [7] C. Phillips-Grafflin, H. B. Suay, J. Mainprice et al., “From Autonomy to Cooperative Traded Control of Humanoid Manipulation Tasks with Unreliable Communication,” J. of Intelligent and Robotic Systems, Vol.82, pp. 341-361, 2016. https://doi.org/10.1007/s10846-015-0256-5
- [8] M. Bandala, C. West, S. Monk et al., “Vision-Based Assisted Tele-Operation of a Dual-Arm Hydraulically Actuated Robot for Pipe Cutting and Grasping in Nuclear Environments,” Robotics, Vol.8, No.2, Article No.42, 2019. https://doi.org/10.3390/robotics8020042
- [9] S. D. Monk, A. Grievson, M. Bandala et al., “Implementation and Evaluation of a Semi-Autonomous Hydraulic Dual Manipulator for Cutting Pipework in Radiologically Active Environments,” Robotics, Vol.10, No.2, Article No.62, 2021. https://doi.org/10.3390/robotics10020062
- [10] D. Kent, C. Saldanha, and S. Chernova, “A Comparison of Remote Robot Teleoperation Interfaces for General Object Manipulation,” Proc. of the 2017 12th ACM/IEEE Int. Conf. on Human-Robot Interaction (HRI), pp. 371-379, 2017.
- [11] M. Rubagotti, T. Taunyazov, B. Omarali, and A. Shintemirov, “Semi-Autonomous Robot Teleoperation with Obstacle Avoidance via Model Predictive Control,” IEEE Robotics and Automation Letters, Vol.4, Issue 3, pp. 2746-2753, 2019. https://doi.org/10.1109/LRA.2019.2917707
- [12] N. Mizuno, Y. Tazaki, T. Hashimoto, and Y. Yokokohji, “A Comparative Study of Manipulator Teleoperation Methods for Debris Retrieval Phase in Nuclear Power Plant Decommissioning,” Advanced Robotics, Vol.37, No.9, pp. 541-559, 2023. https://doi.org/10.1080/01691864.2023.2169588
- [13] M. D. Killpack, A. Kapusta, and C. C. Kemp, “Model Predictive Control for Fast Reaching in Clutter,” Autonomous Robots, Vol.40, pp. 537-560, 2016. https://doi.org/10.1007/s10514-015-9492-6
- [14] Y. Tazaki and T. Suzuki, “Constraint-Based Prioritized Trajectory Planning for Multi-Body Systems,” IEEE Trans. on Robotics, Vol.30, No.5, pp. 1227-1234, 2014. https://doi.org/10.1109/TRO.2014.2320794
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.