Development Report:
Navit(oo)n: Open Source Mobile Robot Project for Nakanoshima Robot Challenge
Shunya Hara, Toshihiko Shimizu, Masayoshi Ozawa, Masahiko Sakai, Tadahiro Oyama, and Amar Julien Samuel
Kobe City College of Technology
8-3 Gakuen-Higashimachi, Nishi-ku, Kobe 651-2194, Japan

Recently, the legislation regarding autonomous mobile robots for outdoor pedestrian areas have been advancing, leading to increased expectations for task automation such as transportation and cleaning. Outdoor environments like parks, where vehicles cannot enter, present many three-dimensional terrains such as stairs and inclined surfaces, causing difficulty in achieving accurate environment recognition and autonomous movement. Furthermore, robots that navigate pedestrian walkways must be smaller and lighter than cars and also have a robust system capable of traversing steps and uneven surfaces and withstanding rainy weather. Currently, robots designed for paved roads are commercially available; however, robots capable of navigating park walkways are still in the research and development stage. Therefore, to accelerate the research and development of outdoor autonomous mobile robots, this study proposes the Navit(oo)n platform, designed for use in outdoor environments. This robot can be manufactured using easily obtainable parts, and all CAD data, circuit design data, and autonomous movement software are provided as open source. This paper introduces an overview of Navit(oo)n that successfully completed the course and achieved all tasks in the recent Nakanoshima Robot Challenge.
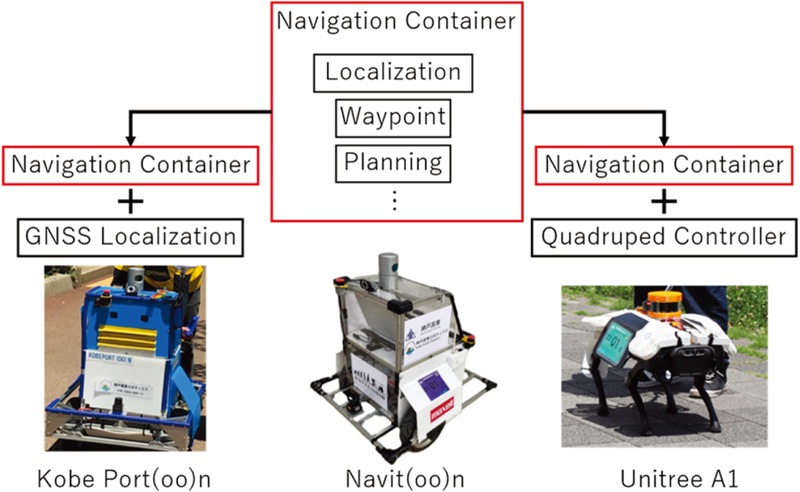
“Navit(oo)n” universal platform
- [1] S. Hara, T. Shimizu, M. Konishi, R. Yamamura, and S. Ikemoto, “Autonomous mobile robot for outdoor slope using 2D LiDAR with uniaxial gimbal mechanism,” J. Robot. Mechatron., Vol.32, No.6, pp. 1173-1182, 2020. https://doi.org/10.20965/jrm.2020.p1173
- [2] T. Yoshida, K. Irie, E. Koyanagi, and M. Tomono, “An Outdoor Navigation Platform with a 3D Scanner and Gyro-assisted Odometry,” Trans. of the Society of Instrument and Control Engineers, Vol.47, No.10, pp. 493-500, 2011 (in Japanese). https://doi.org/10.9746/sicetr.47.493
- [3] N. Kimura and J. Ota, “Unknown Object Detection Using Floor Height Map for Mobile Robots on Indoor Floor with Non-Horizontal Partial Areas,” J. of the Robotics Society of Japan, Vol.34, No.10, pp. 699-710, 2011 (in Japanese). https://doi.org/10.7210/jrsj.34.699
- [4] R. Sakai, S. Katsumata, T. Miki, T. Yano, W. Wei, Y. Okadome, N. Chihara, N. Kimura, Y. Nakai, I. Matsuo, and T. Shimizu, “A mobile dual-arm manipulation robot system for stocking and disposing of items in a convenience store by using universal vacuum grippers for grasping items,” Advanced Robotics, Vol.34, Nos.3-4, pp. 219-234, 2020. https://doi.org/10.1080/01691864.2019.1705909
- [5] I. Matsuo, T. Shimizu, Y. Nakai, M. Kakimoto, Y. Sawasaki, Y. Mori, T. Sugano, S. Ikemoto, and T. Miyamoto, “Q-bot: heavy ob- ject carriage robot for in-house logistics based on universal vacuum gripper,” Advanced Robotics, Vol.34, Nos.3-4, pp. 173-188, 2020. https://doi.org/10.1080/01691864.2019.1709987
- [6] L. E. Hafi, G. A. G. Ricardez, F. von Drigalski, Y. Inoue, M. Yamamoto, and T. Yamamoto, “Software development environment for collaborative research workflow in robotic system integration,” Advanced Robotics, Vol.36, No.11, pp. 533-547, 2022. https://doi.org/10.1080/01691864.2022.2068353
- [7] A. Watanabe, D. Endo, G. Yamauchi, and K. Nagatani, “Neonavigation meta-package: 2-D/3-DOF seamless global-local planner for ROS—Development and field test on the representative offshore oil plant,” 2016 IEEE Int. Symp. on Safety, Security, and Rescue Robotics, pp. 86-91, 2016. https://doi.org/10.1109/SSRR.2016.7784282
- [8] M. Quigley, B. Gerkey, K. Conley, J. Faust, T. Foote, J. Leibs, E. Berger, R. Wheeler, and A. Ng, “ROS: An open-source Robot Operating System,” ICRA Workshop on Open Source Software, Vol.3, No.3.2, 2009.
- [9] T. Shan and E. Brendan, “Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain,” 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4758-4765, 2018. https://doi.org/10.1109/IROS.2018.8594299
- [10] T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5135-5142, 2020. https://doi.org/10.1109/IROS45743.2020.9341176
- [11] S. Tarao, Y. Fujiwara, N. Tsuda, and S. Takata, “Prototyping using a mobile robot platform equipped with low-end in-wheel motors,” J. Robot. Mechatron., Vol.32, No.6, pp. 1154-1163, 2020. https://doi.org/10.20965/jrm.2020.p1154
- [12] M. Yusuke and K. Nagao, “Automatic Generation of Multidestination Routes for Autonomous Wheelchairs,” J. Robot. Mechatron., Vol.32, No.6, pp. 1121-1136, 2020. https://doi.org/10.20965/jrm.2020.p1121
- [13] M. Magnusson, “The three-dimensional normal-distributions transform: An efficient representation for registration, surface analysis, and loop detection,” Doctoral Thesis, Örebro University, 2009.
- [14] K. Koide, J. Miura, and E. Menegatti, “A portable three-dimensional LIDAR-based system for long-term and wide-area people behavior measurement,” Int. J. of Advanced Robotic Systems, Vol.16, No.2, 2019. https://doi.org/10.1177/1729881419841532
- [15] S. O. H. Madgwick, “An efficient orientation filter for inertial and inertial/magnetic sensor arrays,” Report x-io and University of Bristol (UK), pp. 113-118, 2010.
- [16] D. V. Lu, D. Hershberger, and W. D. Smart, “Layered costmaps for context-sensitive navigation,” 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 709-715, 2014. https://doi.org/10.1109/IROS.2014.6942636
- [17] E. Dijkstra, “A note on two problems in connexion with graphs,” Numerische Mathematik, Vol.1, pp. 269-271, 1959. https://doi.org/10.1007/BF01386390
- [18] N. Nilsson, “A mobile automaton: An application of artificial intelligence techniques,” Sri International Menlo Park Ca Artificial Intelligence Center, 1969. https://doi.org/10.21236/ada459660
- [19] A. L. Rankin, C. D. Crane III, D. G. Armstrong II, A. D. Nease, and H. E. Brown, “Autonomous path-planning navigation system for site characterization,” Proc. of SPIE, Navigation and Control Technologies for Unmanned Systems, Vol.2738, pp. 176-186, 1996. https://doi.org/10.1117/12.241081 https://doi.org/10.1117/12.241081
- [20] J. Wit, C. D. Crane, and D. Armstrong, “Autonomous ground vehicle path tracking,” J. of Robotic Systems, Vol.21, No.8, pp. 439-449, 2004. https://doi.org/10.1002/rob.20031
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.