Paper:
Path Planning Using a Flow of Pedestrian Traffic in an Unknown Environment
Kiichiro Ishikawa, Kei Otomo, Hayato Osaki, and Taiga Odaka
Department of Mechanical Engineering, Faculty of Fundamental Engineering, Nippon Institute of Technology
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun, Saitama 345-8501, Japan

This paper outlines a path planning method for autonomous rovers navigating urban environments without prior mapping, with a particular focus on addressing the Tsukuba Challenge. Our approach utilizes observations of pedestrian and robot movement trajectories to construct path graphs for global path planning. We provide a detailed overview of the autonomous rover’s hardware and software system, as well as a comprehensive description of the path planning algorithm. Our methodology entails extracting and continuously tracking dynamic objects from LiDAR data, resulting in the creation of a path graph based on their observed trajectories. Subsequently, a path aligned with the desired direction is selected. Notably, in indoor experimental settings, our approach proves effective, as the rover successfully generates a path to the goal by closely monitoring and tracking pedestrian movements. In conclusion, this paper introduces a promising path planning methodology and suggests potential areas for further research in autonomous mobility within uncharted environments.
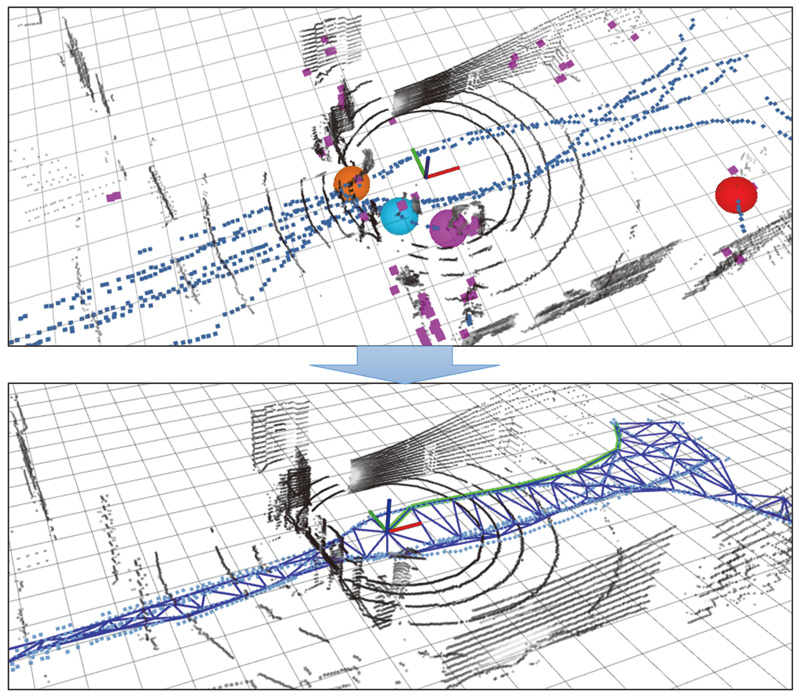
Path planning using pedestrian trajectories
- [1] Y. Hara, T. Tomizawa, H. Date, Y. Kuroda, and T. Tsubouchi, “Tsukuba Challenge 2019: Task Settings and Experimental Results,” J. Robot. Mechatron., Vol.32, No.6, pp. 1104-1111, 2020. https://doi.org/jrm.2020.p1104
- [2] S. Yuta, “Tsukuba Challenge: Open Experiments for Autonomous Navigation of Mobile Robots in the City – Activities and Results of the First and Second Stages –,” J. Robot. Mechatron., Vol.30, No.4, pp. 504-512, 2018. https://doi.org/jrm.2018.p0504
- [3] D. Wettergreen, D. Jonak, D. Kohanbash, S. Moreland, S. Spiker, J. Teza, and W. Whittaker, “Design and Experimentation of a Rover Concept for Lunar Crater Resource Survey,” 47th AIAA Aerospace Science Meeting including The New Horizons Forum and Aerospace Exposition, 2009. https://doi.org/10.2514/6.2009-1206
- [4] P. Visscher and D. Woolley, “Midsize Lunar Rover Development and Testing,” The 12th Int. Symp. on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2014), 2014.
- [5] M. Quigley, B. Gerkey, K. Conley, J. Faust, T. Foote, J. Leibs, E. Berger, R. Wheeler, and A. Ng, “ROS: An open-source Robot Operating System,” ICRA Workshop on Open Source Software, Vol.3, No.2, 2009.
- [6] Y. Tamura, Y. Terada, A. Yamashita, and H. Asama, “Modelling Behaviour Patterns of Pedestrians for Mobile Robot Trajectory Generation,” Int. J. of Advanced Robotic Systems, Vol.10, No.8, Article No.310, 2013. https://doi.org/10.5772/56668
- [7] W. Kumahara, Y. Tamura, A. Yamashita, and H. Asama, “Navigation System for Mobile Robot Based on Topological Map and Pedestrians Flow,” 17th Robotics Symposia, pp. 163-168, 2012 (in Japanese).
- [8] R. Gockley, J. Forizzi, and R. Simmons, “Natural Person-following Behavior for Social Robots,” ACM SIGCHI/SIGART Conf. on Human-Robot Interaction, pp. 10-12, 2007. https://doi.org/10.1145/1228716.1228720
- [9] Z. Chen and S. T. Birchfield, “Person Following with a Mobile Robot Using Binocular Feature-Based Tracking,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2007. https://doi.org/10.1109/IROS.2007.4399459
- [10] B. Ilias, S. A. Abdul Shukor, S. Yaacob, A. H. Adom, and M. H. Mohd Razali, “A Nurse Following Robot with High Speed Kinect Sensor,” ARPN J. of Engineering and Applied Sciences, Vol.9, No.12, pp. 2454-2459, 2014.
- [11] D. Schulz, W. Burgard, D. Fox, and A. B. Cremers, “People Tracking with a Mobile Robot Using Sample Based Joint Probabilistic Data Association Filters,” Int. J. of Robotics Research, Vol.22, No.2, pp. 99-116, 2003. https://doi.org/10.1177/0278364903022002002
- [12] M. Kobilarov, G. Sukhatme, J. Hyams, and P. Batavia, “People tracking and following with mobile robot using an omnidirectional camera and a laser,” Proc. IEEE Int. Conf. on Robotics and Automation, 2006. https://doi.org/10.1109/ROBOT.2006.1641769
- [13] S. Sato, M. Hashimoto, M. Takita, K. Takagi, and T. Ogawa, “Multilayer Lidar-Based Pedestrian Tracking in Urban Environments,” 2010 IEEE Intelligent Vehicles Symp., pp. 849-854, 2010. https://doi.org/10.1109/IVS.2010.5548135
- [14] M. Schütz, N. Appenrodt, J. Dickmann, and K. Dietmayer, “Occupancy Grid Map-Based Extended Object Tracking,” 2014 IEEE Intelligent Vehicles Symp. (IV), pp. 1205-1210, 2014. https://doi.org/10.1109/IVS.2014.6856504
- [15] S. Shen, M. Saito, Y. Uzawa, and T. Ito, “Optimal Clustering of Point Cloud by 2D-LiDAR Using Kalman Filter,” J. Robot. Mechatron., Vol.35, No.2, pp. 424-434, 2023. https://doi.org/10.20965/jrm.2023.p0424
- [16] M. Dimitrievski, P. Veelaert, and W. Philips, “Behavioral Pedestrian Tracking Using a Camera and LiDAR Sensors on a Moving Vehicle,” Sensors, Vol.19, Issue 2, Article No.391, 2019. https://doi.org/10.3390/s19020391
- [17] R. A. Metoyer and J. K. Hodings, “Reactive Pedestrian Path Following from Examples,” The Visual Computer, Vol.20, pp. 635-649, 2004. https://doi.org/10.1007/s00371-004-0265-z
- [18] J. Gómez, O. Aycard, and J. Baber, “Efficient Detection and Tracking of Human Using 3D LiDAR Sensor,” Sensors, Vol.23, Issue 10, Article No.4720, 2023. https://doi.org/10.3390/s23104720
- [19] A. Asahara, N. Sato, M. Nomiya, and S. Tsuji, “LiDAR-based pedestrian-flow analysis for crowdedness equalization,” Proc. of the 23rd SIGSPATIAL Int. Conf. on Advances in Geographic Information Systems (SIGSPATIAL’15), Article No.30, 2015. https://doi.org/10.1145/2820783.2820805
- [20] T. Kitazato, M. Hoshino, M. Ito, and K. Sezaki, “Detection of Pedestrian Flow Using Mobile Devices for Evacuation Guiding in Disaster,” J. Disaster Res., Vol.13, No.2, pp. 303-312, 2018. https://doi.org/10.20965/jdr.2018.p0303
- [21] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2005.
- [22] E. W. Dijkstra, “A Note on Two Problems in Connexion with Graphs,” Numerische Mathematik, Vol.1, pp. 269-271, 1959. https://doi.org/10.1007/BF01386390
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.