Paper:
Local Curvature Estimation and Grasp Stability Prediction Based on Proximity Sensors on a Multi-Fingered Robot Hand
Yosuke Suzuki
 , Ryoya Yoshida, Tokuo Tsuji
, Toshihiro Nishimura
, and Tetsuyou Watanabe
, Ryoya Yoshida, Tokuo Tsuji
, Toshihiro Nishimura
, and Tetsuyou Watanabe
Kanazawa University
Kakuma-machi, Kanazawa, Ishikawa 920-1192, Japan

This study aims to realize a precision grasp of unknown-shaped objects. Precision grasping requires a detailed understanding of the surface shapes such as concavity and convexity. If an accurate shape model is not given in advance, it must be addressed by sensing. We have proposed a method for recognizing detailed object shapes using proximity sensors equipped on each fingertip of a multi-fingered robot hand. Direct sensing of the object’s surface from the fingertips enables both avoidance of unintended collision during the approach process and recognition of surface profiles for use in planning and executing stable grasping. This paper introduces local surface curvature estimation to improve the accuracy of local surface recognition. We propose practical and accurate models to estimate local curvature based on various characteristic tests on the proximity sensor and to estimate the distance to the nearest point. In actual experiments, it was shown that it was possible to estimate the position of the nearest point with a mean error of less than 2 mm and to predict grasping stability in reasonable real-time for the object shape.
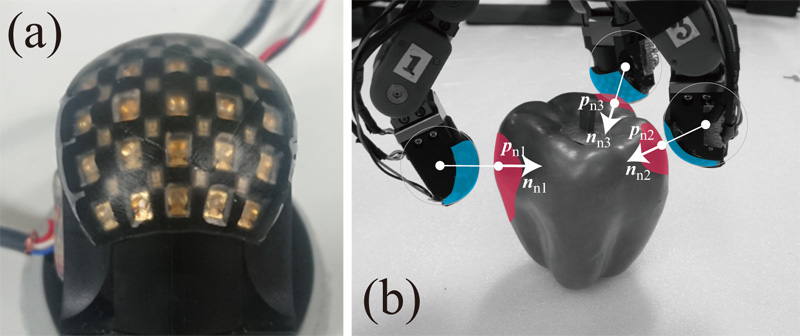
Concept of the method
- [1] Y. Suzuki, R. Yoshida, T. Tsuji, T. Nishimura, and T. Watanabe, “Local shape detection and grasp-stability prediction based on proximity sensors on the multi-fingered robot hand,” Proc. of 2022 JSME Annual Conf. on Robotics and Mechatronics, Session ID 2A2-N09, 2022 (in Japanese). https://doi.org/10.1299/jsmermd.2022.2A2-N09
- [2] S. E. Navarro, S. Mühlbacher-Karrer, H. Alagi, H. Zangl, K. Koyama, B. Hein, C. Duriez, and J. R. Smith, “Proximity perception in human-centered robotics: A survey on sensing systems and applications,” IEEE Trans. on Robotics, Vol.38, No.3, pp. 1599-1620, 2022. https://doi.org/10.1109/TRO.2021.3111786
- [3] J. Konstantinova, A. Stilli, A. Faragasso, and K. Althoefer, “Fingertip proximity sensor with realtime visual-based calibration,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 170-175, 2016. https://doi.org/10.1109/IROS.2016.7759051
- [4] Y. Suzuki, M. Setogawa, A. Ming, and M. Shimojo, “Grasp motion planning by non-contact groping based on proximity sensors on robot fingertips,” J. of the Robotics Society of Japan, Vol.35, No.2, pp. 135-142, 2017 (in Japanese). https://doi.org/10.7210/jrsj.35.135
- [5] Z. Yue, G. A. Garcia Ricardez, Y. Suzuki, and T. Taniguchi, “Reflectance estimation based on neural network regression for proximty-based pre-contact gripper setting,” Proc. of the 40th Annual Conf. of the Robotics Society of Japan (RSJ2022), 2F2-03, 2022.
- [6] S. Hasegawa, N. Yamaguchi, K. Okada, and M. Inaba, “Online acquisition of close-range proximity sensor models for precise object grasping and verification,” IEEE Robotics and Automation Letters, Vol.5, No.4, pp. 5993-6000, 2020. https://doi.org/10.1109/LRA.2020.3010440
- [7] H. Arita and Y. Suzuki, “Contact transition control by adjusting emitting energy of proximity sensor,” Advanced Robotics, Vol.35, No.2, pp. 93-107, 2021. https://doi.org/10.1080/01691864.2020.1848622
- [8] Y. Suzuki, “Proximity-based non-contact perception and omnidirectional point-cloud generation based on hierarchical information on fingertip proximity sensors,” Advanced Robotics, Vol.35, No.20, pp. 1181-1197, 2021. https://doi.org/10.1080/01691864.2021.1969268
- [9] K. Hsiao, P. Nangeroni, M. Huber, A. Saxena, and A. Y. Ng, “Reactive grasping using optical proximity sensors,” 2009 IEEE Int. Conf. on Robotics and Automation, pp. 2098-2105, 2009. https://doi.org/10.1109/ROBOT.2009.5152849
- [10] K. Koyama, H. Hasegawa, Y. Suzuki, A. Ming, and M. Shimojo, “Pre-shaping for various objects by the robot hand equipped with resistor network structure proximity sensors,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4027-4033, 2013. https://doi.org/10.1109/IROS.2013.6696932
- [11] H. Hasegawa, Y. Mizoguchi, K. Tadakuma, A. Ming, M. Ishikawa, and M. Shimojo, “Development of intelligent robot hand using proximity, contact and slip sensing,” 2010 IEEE Int. Conf. on Robotics and Automation, pp. 777-784, 2010. https://doi.org/10.1109/ROBOT.2010.5509243
- [12] R. Patel and N. Correll, “Integrated force and distance sensing using elastomer-embedded commodity proximity sensors,” Proc. of Robotics: Science and Systems, Vol.12, 2016. https://doi.org/10.15607/RSS.2016.XII.035
- [13] L.-T. Jiang and J. R. Smith, “Seashell effect pretouch sensing for robotic grasping,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 2851-2858, 2012. https://doi.org/10.1109/ICRA.2012.6224985
- [14] P. Lancaster, B. Yang, and J. R. Smith, “Improved object pose estimation via deep pre-touch sensing,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2448-2455, 2017. https://doi.org/10.1109/IROS.2017.8206061
- [15] S. E. Navarro, M. Schonert, B. Hein, and H. Wörn, “6D proximity servoing for preshaping and haptic exploration using capacitive tactile proximity sensors,” 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 7-14, 2014. https://doi.org/10.1109/IROS.2014.6942533
- [16] R. Sato, H. Arita, and A. Ming, “Pre-landing control for a legged robot based on tiptoe proximity sensor feedback,” IEEE Access, Vol.10, pp. 21619-21630, 2022. https://doi.org/10.1109/ACCESS.2022.3153127
- [17] Y. Hirai, T. Mizukami, Y. Suzuki, T. Tsuji, and T. Watanabe, “Hierarchical proximity sensor for high-speed and intelligent control of robotic hand,” J. Robot. Mechatron., Vol.31, No.3, pp. 453-463, 2019. https://doi.org/10.20965/jrm.2019.p0453
- [18] C. Ferrari and J. Canny, “Planning optimal grasps,” Proc. 1992 IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2290-2295, 1992. https://doi.org/10.1109/ROBOT.1992.219918
- [19] T. Tsuji, K. Harada, and K. Kaneko, “Easy and fast evaluation of grasp stability by using ellipsoidal approximation of friction cone,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1830-1837, 2009. https://doi.org/10.1109/IROS.2009.5354501
- [20] Y. Suzuki, R. Yoshida, T. Tsuji, T. Nishimura, and T. Watanabe, “Grasping strategy for unknown objects based on real-time grasp-stability evaluation using proximity sensing,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 8643-8650, 2022. https://doi.org/10.1109/LRA.2022.3188885
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.