Paper:
Environmental Mapping of Underwater Structures Based on Remotely Operated Vehicles with Sonar System
Bochen Ma
 , Tiancheng Du, and Tasuku Miyoshi
, Tiancheng Du, and Tasuku Miyoshi
Division of Science and Engineering, Graduate School of Arts and Sciences, Iwate University
4-3-5 Ueda, Morioka, Iwate 020-8551, Japan

Recently, underwater robotics has rapidly developed, and is often used in open-water exploration and underwater operations in known environments. However, there are still several problems in exploring the interiors of complex underwater environments, which are essential for scientific exploration and industrial applications, such as caves and shipwrecks. This study aims to complete the exploration of the environment of structures under water bodies. A real-time manipulative small underwater robot was designed and developed. The robot’s autonomous depth control and linear motion-assisted control are also realized by real-time sensor data processing, which provides stability and operability to move in small areas and complex environments. The sonar system is used to construct a submap for small-area scanning. Finally, by combining the odometer algorithm and contour extraction, the submaps are stitched together to construct a complete map of the internal underwater environment.
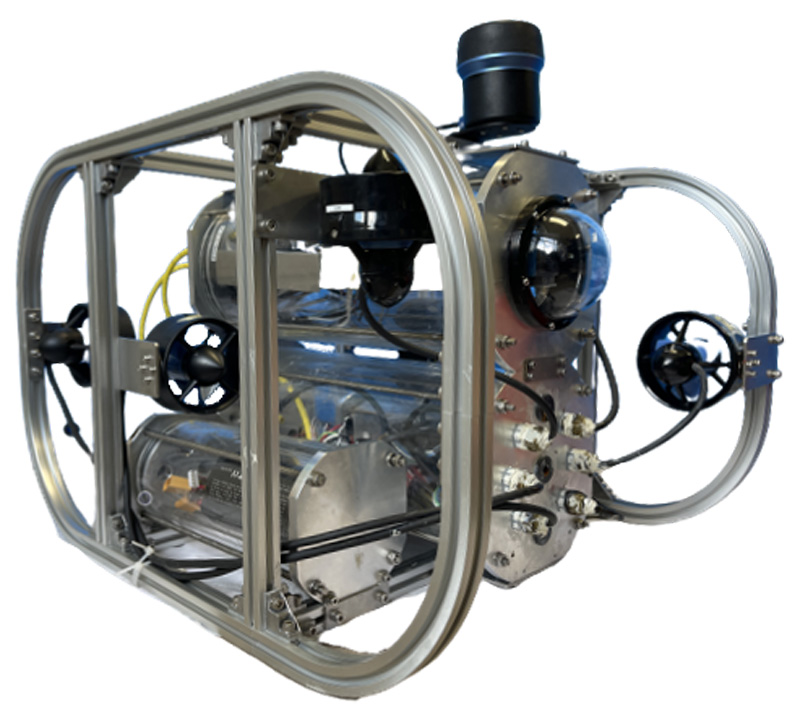
ROV for underwater structure surveys
- [1] D. H. Bennion, D. M. Warner, P. C. Esselman, B. Hobson, and B. Kieft, “A comparison of chlorophyll a values obtained from an autonomous underwater vehicle to satellite-based measures for Lake Michigan,” J. Gt. Lakes Res., Vol.45, No.4, pp. 726-734, 2019. https://doi.org/10.1016/j.jglr.2019.04.003
- [2] T. Miyoshi, K. Asaishi, and K. Satoh, “A novel seabed surveying autonomous underwater vehicle with spatial control system for managing fishery resources by a video-transect method,” J. Aquac. Mar. Biol., Vol.7, No.4, pp. 206-211, 2018. https://doi.org/10.15406/jamb.2018.07.00210
- [3] H. Yamagata, S. Kochii, H. Yoshida, Y. Nogi, and T. Maki, “Development of AUV MONACA – Hover-capable platform for detailed observation under ice –,” J. Robot. Mechatron., Vol.33, No.6, pp. 1223-1233, 2021. https://doi.org/10.20965/jrm.2021.p1223
- [4] T. Maki, Y. Noguchi, Y. Kuranaga, K. Masuda, T. Sakamaki, M. Humblet, and Y. Furushima, “Low-altitude and high-speed terrain tracking method for lightweight AUVs,” J. Robot. Mechatron., Vol.30, No.6, pp. 971-979, 2018. https://doi.org/10.20965/jrm.2018.p0971
- [5] V. L. G. Todd, L. D. Williamson, S. E. Cox, I. B. Todd, and P. I. Macreadie, “Characterizing the first wave of fish and invertebrate colonization on a new offshore petroleum platform,” ICES J. Mar. Sci., Vol.77, No.3, pp. 1127-1136, 2020. https://doi.org/10.1093/icesjms/fsz077
- [6] M. Takagi, H. Mori, A. Yimit, Y. Hagihara, and T. Miyoshi, “Development of a small size underwater robot for observing fisheries resources – Underwater robot for assisting abalone fishing –,” J. Robot. Mechatron., Vol.28, No.3, pp. 397-403, 2016. https://doi.org/10.20965/jrm.2016.p0397
- [7] D. R. Yoerger, A. F. Govindarajan, J. C. Howland, J. K. Llopiz, P. H. Wiebe, M. Curran, J. Fujii, D. Gomez-Ibanez, K. Katija, B. H. Robinson, B. W. Hobson, M. Risi, and S. M. Rock, “A hybrid underwater robot for multidisciplinary investigation of the ocean twilight zone,” Science Robotics, Vol.6, No.55, Article No.eabe1901, 2021. https://doi.org/10.1126/scirobotics.abe1901
- [8] E. Sato, H. Liu, Y. Orita, N. Sakagami, and T. Wada, “Cooperative path-following control of a remotely operated underwater vehicle for human visual inspection task,” Front. Control Eng., Vol.3, Article No.1056937, 2022. https://doi.org/10.3389/fcteg.2022.1056937
- [9] D. Park, Y. Lee, K. Jung, H.-J. Kang, H. Ki, J.-W. Lee, Y.-H. Choi, J.-H. Li, H. Myung, H.-T. Choi, and J.-H. Suh, “Autonomous underwater vehicle navigation in structured environment,” 2018 IEEE/RSJ Int. Conf. Intell. Robots and Syst. (IROS), p. 5039, 2018. https://doi.org/10.1109/IROS.2018.8594429
- [10] S. Pi, B. He, S. Zhang, R. Nian, Y. Shen, and T. Yan, “Stereo visual SLAM system in underwater environment,” OCEANS 2014 – TAIPEI, 2014. https://doi.org/10.1109/OCEANS-TAIPEI.2014.6964369
- [11] C. Gu, Y. Cong, and G. Sun, “Environment driven underwater camera-IMU calibration for monocular visual-inertial SLAM,” 2019 Int. Conf. Robot. Autom. (ICRA), pp. 2405-2411, 2019. https://doi.org/10.1109/ICRA.2019.8793577
- [12] M. Myint, K. Yonemori, A. Yanou, K. N. Lwin, M. Minami, and S. Ishiyama, “Visual servoing for underwater vehicle using dual-eyes evolutionary real-time pose tracking,” J. Robot. Mechatron., Vol.28, No.4, pp. 543-558, 2016. https://doi.org/10.20965/jrm.2016.p0543
- [13] J. Teague, M. J. Allen, and T. B. Scott, “The potential of low-cost ROV for use in deep-sea mineral, ore prospecting and monitoring,” Ocean Eng., Vol.147, pp. 333-339, 2018. https://doi.org/10.1016/j.oceaneng.2017.10.046
- [14] S. Rahman, A. Q. Li, and I. Rekleitis, “Sonar visual inertial SLAM of underwater structures,” 2018 Int. Conf. Robot. Autom. (ICRA), pp. 5190-5196, 2018. https://doi.org/10.1109/ICRA.2018.8460545
- [15] A. Rubio-Solis, U. Martinez-Hernandez, L. Nava-Balanzar, L. G. Garcia-Valdovinos, N. A. Rodriguez-Olivares, J. P. Orozco-Muñiz, and T. Salgado-Jimenez, “Online Interval Type-2 Fuzzy Extreme Learning Machine applied to 3D path following for remotely operated underwater vehicles,” Appl. Soft Comput., Vol.115, Article No.108054, 2022. https://doi.org/10.1016/j.asoc.2021.108054
- [16] H. Azpúrua, M. Saboia, G. M. Freitas, L. Clark, A. Agha-Mohammadi, G. Pessin, M. F. M. Campos, and D. G. Macharet, “A survey on the autonomous exploration of confined subterranean spaces: Perspectives from real-word and industrial robotic deployments,” Robot. Auton. Syst., Vol.160, Article No.104304, 2023. https://doi.org/10.1016/j.robot.2022.104304
- [17] C. Sakar, M. Buber, B. Koseoglu, and A. C. Toz, “Risk analysis for confined space accidents onboard ship using fuzzy bow-tie methodology,” Ocean Eng., Vol.263, Article No.112386, 2022. https://doi.org/10.1016/j.oceaneng.2022.112386
- [18] J. Xia, Y. Liu, D. Zhao, Y. Tian, J. Li, Y. Zhong, and N. Roy, “Human factors analysis of China’s confined space operation accidents from 2008 to 2018,” J. Loss Prev. Process Ind., Vol.71, Article No.104480, 2021. https://doi.org/10.1016/j.jlp.2021.104480
- [19] S. Halder, K. Afsari, E. Chiou, R. Patrick, and K. A. Hamed, “Construction inspection & monitoring with quadruped robots in future human-robot teaming: A preliminary study,” J. Build. Eng., Vol.65, Article No.105814, 2023. https://doi.org/10.1016/j.jobe.2022.105814
- [20] B. Wong, W. Marquette, N. Bykov, T. M. Paine, and A. G. Banerjee, “Human-assisted robotic detection of foreign object debris inside confined spaces of marine vessels using probabilistic mapping,” Robot. Auton. Syst., Vol.161, Article No.104349, 2023. https://doi.org/10.1016/j.robot.2022.104349
- [21] J. Wang, S. Bai, and B. Englot, “Underwater localization and 3D mapping of submerged structures with a single-beam scanning sonar,” 2017 IEEE Int. Conf. Robot. Autom. (ICRA), pp. 4898-4905, 2017. https://doi.org/10.1109/ICRA.2017.7989567
- [22] M. Carreras, J. D. Hernández, E. Vidal, N. Palomeras, D. Ribas, and P. Ridao, “Sparus II AUV—A hovering vehicle for seabed inspection,” IEEE J. Ocean. Eng., Vol.43, No.2, pp. 344-355, 2018. https://doi.org/10.1109/JOE.2018.2792278
- [23] J. Yuan, H. Liu, J. Wan, H. Li, and W. Zhang, “Combined depth and heading control and experiment of ROV under the influence of residual buoyancy, current disturbance, and control dead zone,” J. Field Robot., Vol.40, No.2, pp. 330-345, 2023. https://doi.org/10.1002/rob.22132
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.