Paper:
When Less Is More in Embodied Evolution: Robotic Swarms Have Better Evolvability with Constrained Communication
Motoaki Hiraga*
 , Daichi Morimoto**, Yoshiaki Katada***
, and Kazuhiro Ohkura**
, Daichi Morimoto**, Yoshiaki Katada***
, and Kazuhiro Ohkura**
*Kyoto Institute of Technology
Goshokaido-cho, Matsugasaki, Sakyo-ku, Kyoto 606-8585, Japan
**Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan
***Setsunan University
17-8 Ikedanaka-machi, Neyagawa, Osaka 572-8508, Japan

Embodied evolution is an evolutionary robotics approach that implements an evolutionary algorithm over a population of robots and evolves while the robots perform their tasks. In embodied evolution, robots send and receive genomes from their neighbors and generate an offspring genome from the exchanged genomes. This study focused on the effects of the communication range for exchanging genomes on the evolvability of embodied evolution. Experiments were conducted using computer simulations, where robot controllers were evolved during a two-target navigation task. The results of the experiments showed that the robotic swarm could achieve better performance by reducing the communication range for exchanging genomes.
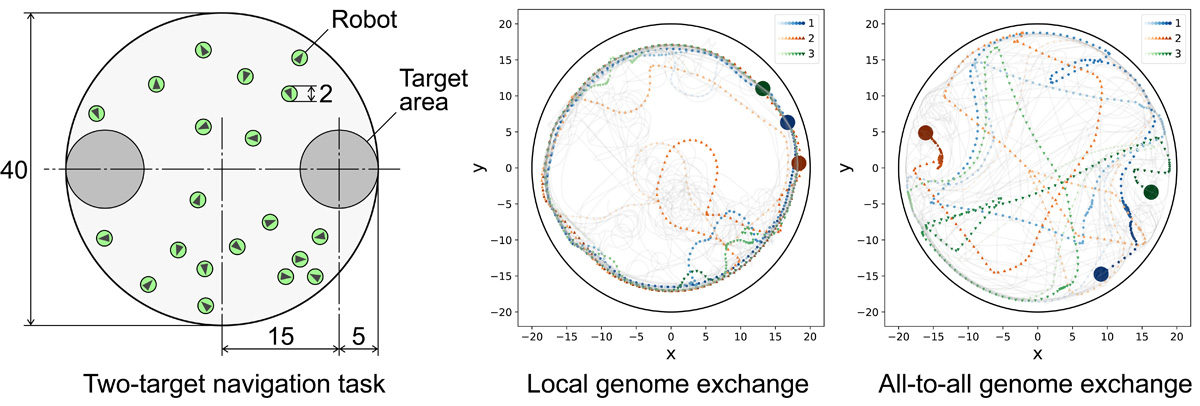
Robot trajectories using evolved controllers
- [1] E. Şahin, “Swarm robotics: From sources of inspiration to domains of application,” E. Şahin and W. M. Spears (Eds.), “Swarm Robotics,” pp. 10-20, Springer, 2005. https://doi.org/10.1007/978-3-540-30552-1_2
- [2] M. Dorigo, M. Birattari, and M. Brambilla, “Swarm robotics,” Scholarpedia, Vol.9, No.1, Article No.1463, 2014. http://doi.org/10.4249/scholarpedia.1463
- [3] H. Hamann, “Swarm Robotics: A Formal Approach,” Springer, 2018. https://doi.org/10.1007/978-3-319-74528-2
- [4] M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo, “Swarm robotics: A review from the swarm engineering perspective,” Swarm Intelligence, Vol.7, No.1, pp. 1-41, 2013. https://doi.org/10.1007/s11721-012-0075-2
- [5] G. Francesca and M. Birattari, “Automatic design of robot swarms: Achievements and challenges,” Frontiers in Robotics and AI, Vol.3, Article No.29, 2016. https://doi.org/10.3389/frobt.2016.00029
- [6] S. Nolfi and D. Floreano, “Evolutionary Robotics: The Biology, Intelligence, and Technology of Self-Organizing Machines,” MIT Press, 2000.
- [7] V. Trianni, “Evolutionary Swarm Robotics: Evolving Self-Organising Behaviours in Groups of Autonomous Robots,” Springer, 2008. https://doi.org/10.1007/978-3-540-77612-3
- [8] V. Trianni, R. Groß, T. H. Labella, E. Şahin, and M. Dorigo, “Evolving aggregation behaviors in a swarm of robots,” Proc. of the 7th European Conf. on Artificial Life (ECAL), pp. 865-874, 2003. https://doi.org/10.1007/978-3-540-39432-7_93
- [9] O. Soysal, E. Bahçeci, and E. Şahin, “Aggregation in swarm robotic systems: Evolution and probabilistic control,” Turkish J. of Electrical Engineering and Computer Sciences, Vol.15, No.2, pp. 199-225, 2007.
- [10] R. Groß and M. Dorigo, “Towards group transport by swarms of robots,” Int. J. of Bio-Inspired Computation, Vol.1, Nos.1-2, pp. 1-13, 2009. http://doi.org/10.1504/IJBIC.2009.022770
- [11] M. H. M. Alkilabi, A. Narayan, and E. Tuci, “Cooperative object transport with a swarm of e-puck robots: Robustness and scalability of evolved collective strategies,” Swarm Intelligence, Vol.11, Nos.3-4, pp. 185-209, 2017. https://doi.org/10.1007/s11721-017-0135-8
- [12] Y. Wei, M. Hiraga, K. Ohkura, and Z. Car, “Autonomous task allocation by artificial evolution for robotic swarms in complex tasks,” Artificial Life and Robotics, Vol.24, No.1, pp. 127-134, 2019. https://doi.org/10.1007/s10015-018-0466-6
- [13] T. Yu, T. Yasuda, K. Ohkura, Y. Matsumura, and M. Goka, “Cooperative transport by a swarm robotic system based on CMA-NeuroES approach,” J. Adv. Comput. Intell. Intell. Inform., Vol.17, No.6, pp. 932-942, 2013. https://doi.org/10.20965/jaciii.2013.p0932
- [14] V. Sperati, V. Trianni, and S. Nolfi, “Self-organised path formation in a swarm of robots,” Swarm Intelligence, Vol.5, No.2, pp. 97-119, 2011. https://doi.org/10.1007/s11721-011-0055-y
- [15] M. Hiraga, T. Yasuda, and K. Ohkura, “Evolutionary acquisition of autonomous specialization in a path-formation task of a robotic swarm,” J. Adv. Comput. Intell. Intell. Inform., Vol.22, No.5, pp. 621-628, 2018. https://doi.org/10.20965/jaciii.2018.p0621
- [16] M. Hiraga and K. Ohkura, “Effects of congestion on swarm performance and autonomous specialization in robotic swarms,” J. Robot. Mechatron., Vol.31, No.4, pp. 526-534, 2019. https://doi.org/10.20965/jrm.2019.p0526
- [17] R. A. Watson, S. G. Ficici, and J. B. Pollack, “Embodied Evolution: Distributing an evolutionary algorithm in a population of robots,” Robotics and Autonomous Systems, Vol.39, No.1, pp. 1-18, 2002. https://doi.org/10.1016/S0921-8890(02)00170-7
- [18] N. Bredeche, E. Haasdijk, and A. Prieto, “Embodied evolution in collective robotics: A review,” Frontiers in Robotics and AI, Vol.5, Article No.12, 2018. https://doi.org/10.3389/frobt.2018.00012
- [19] N. Jakobi, P. Husbands, and I. Harvey, “Noise and the reality gap: The use of simulation in evolutionary robotics,” Proc. of the 3rd European Conf. on Artificial Life (ECAL’95), pp. 704-720, 1995. https://doi.org/10.1007/3-540-59496-5_337
- [20] F. Silva, M. Duarte, L. Correia, S. M. Oliveira, and A. L. Christensen, “Open issues in evolutionary robotics,” Evolutionary Computation, Vol.24, No.2, pp. 205-236, 2016. https://doi.org/10.1162/EVCO_a_00172
- [21] F. Silva, L. Correia, and A. L. Christensen, “Evolutionary robotics,” Scholarpedia, Vol.11, No.7, Article No.33333, 2016. http://doi.org/10.4249/scholarpedia.33333
- [22] J.-M. Montanier, S. Carrignon, and N. Bredeche, “Behavioral specialization in embodied evolutionary robotics: Why so difficult?,” Frontiers in Robotics and AI, Vol.3, Article No.38, 2016. https://doi.org/10.3389/frobt.2016.00038
- [23] M. S. Talamali, A. Saha, J. A. R. Marshall, and A. Reina, “When less is more: Robot swarms adapt better to changes with constrained communication,” Science Robotics, Vol.6, No.56, Article No.eabf1416, 2021. https://doi.org/10.1126/scirobotics.abf1416
- [24] A. E. Eiben, E. Haasdijk, and N. Bredeche, “Embodied, on-line, on-board evolution for autonomous robotics,” P. Levi and S. Kernbach (Eds.), “Symbiotic Multi-Robot Organisms: Reliability, Adaptability, Evolution,” pp. 361-382, Springer, 2010.
- [25] E. Haasdijk, N. Bredeche, and A. E. Eiben, “Combining environment-driven adaptation and task-driven optimisation in evolutionary robotics,” PLOS ONE, Vol.9, No.6, Article No.e98466, 2014. https://doi.org/10.1371/journal.pone.0098466
- [26] H. Jaeger, “Echo state network,” Scholarpedia, Vol.2, No.9, Article No.2330, 2007. http://doi.org/10.4249/scholarpedia.2330
- [27] M. Lukoševičius and H. Jaeger, “Reservoir computing approaches to recurrent neural network training,” Computer Science Review, Vol.3, No.3, pp. 127-149, 2009. https://doi.org/10.1016/j.cosrev.2009.03.005
- [28] M. Hiraga, Y. Katada, and K. Ohkura, “Echo state networks for embodied evolution in robotic swarms,” Artificial Life and Robotics, Vol.28, No.1, pp. 139-147, 2023. https://doi.org/10.1007/s10015-022-00828-w
- [29] H.-G. Beyer and H.-P. Schwefel, “Evolution strategies – A comprehensive introduction,” Natural Computing, Vol.1, No.1, pp. 3-52, 2002. https://doi.org/10.1023/A:1015059928466
- [30] A. E. Eiben and J. E Smith, “Introduction to Evolutionary Computing,” Springer, 2003. https://doi.org/10.1007/978-3-662-44874-8
- [31] K. Lerman and A. Galstyan, “Mathematical model of foraging in a group of robots: Effect of interference,” Autonomous Robots, Vol.13, No.2, pp. 127-141, 2002. https://doi.org/10.1023/A:1019633424543
- [32] H. Hamann, “Towards swarm calculus: Urn models of collective decisions and universal properties of swarm performance,” Swarm Intelligence, Vol.7, Nos.2-3, pp. 145-172, 2013. https://doi.org/10.1007/s11721-013-0080-0
- [33] G. Valentini, E. Ferrante, and M. Dorigo, “The best-of-n problem in robot swarms: Formalization, state of the art, and novel perspectives,” Frontiers in Robotics and AI, Vol.4, Article No.9, 2017. https://doi.org/10.3389/frobt.2017.00009
- [34] G. Valentini, “How robots in a large group make decisions as a whole? From biological inspiration to the design of distributed algorithms,” J. of the Society of Instrument and Control Engineers, Vol.59, No.2, pp. 90-98, 2020. https://doi.org/10.11499/sicejl.59.90
- [35] V. Strobel, E. C. Ferrer, and M. Dorigo, “Managing Byzantine robots via blockchain technology in a swarm robotics collective decision making scenario,” Proc. of 17th Int. Conf. on Autonomous Agents and Multiagent Systems (AAMAS’18), pp. 541-549, 2018.
- [36] V. Strobel, E. C. Ferrer, and M. Dorigo, “Blockchain technology secures robot swarms: A comparison of consensus protocols and their resilience to Byzantine robots,” Frontiers in Robotics and AI, Vol.7, Article No.54, 2020. https://doi.org/10.3389/frobt.2020.00054
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.