Paper:
Development of a Human-Centric System Using an IoT-Based Socially Embedded Robot Partner
Jinseok Woo
 , Taiki Sato, and Yasuhiro Ohyama
, Taiki Sato, and Yasuhiro Ohyama
Department of Mechanical Engineering, School of Engineering, Tokyo University of Technology
1404-1 Katakura, Hachioji, Tokyo 192-0982, Japan

Recently, the increasing social isolation of the elderly has caused major social problems, such as loneliness and the progression of dementia. A human-centric system could be a solution to these problems and promote coexistence with humans. Therefore, we aimed to develop a robot system using smart devices, which are essential for the Internet of things (IoT) technology, to provide services, such as information support and monitoring. As the development and application of smart devices become more sophisticated, a hyperconnected society will finally be realized through the development of smart-device-centered robots and their connection to peripheral devices. A hyperconnected society is one in which people, things, and data are connected. Personal mobility is developing and converging with robotic technology to the point where a large mobile robot can board a person. These robot technologies can be connected to wireless networks to provide organically connected services. In the era of Society 5.0, the connection among smart devices, robot systems, and mobility technology is still developing and will be a new paradigm in the development of human-centric systems in the future. Therefore, this study introduces the creation of a human-centric system using a robot system and a mobility system based on the IoT. Finally, we present several examples of the effectiveness of the proposed system and discuss its applicability.
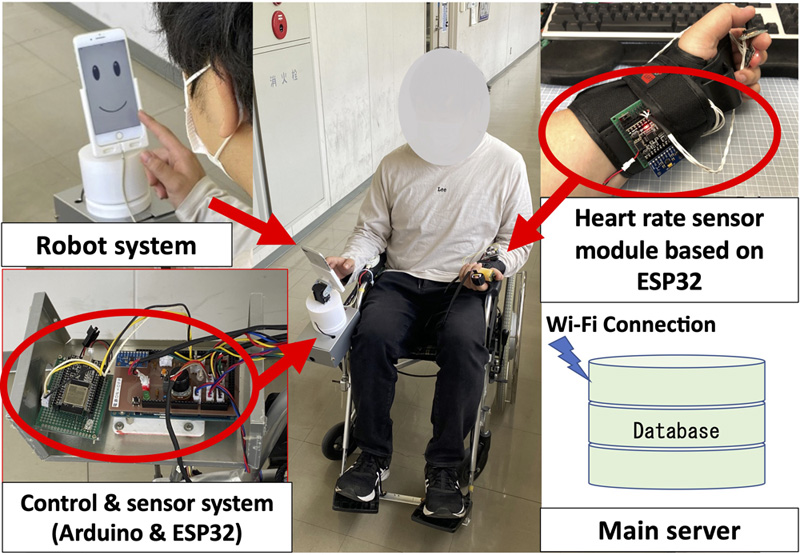
Personal mobility system integrated with a robot system
- [1] C. Matt, T. Hess, and A. Benlian, “Digital transformation strategies,” Business and Information Systems Engineering, Vol.57, No.5, pp. 339-343, 2015.
- [2] G. Vial, “Understanding digital transformation: A review and a research agenda,” Managing Digital Transformation, pp. 13-66, Routledge, 2021.
- [3] J. Kaivo-Oja, S. Roth, and L. Westerlund, “Futures of robotics. Human work in digital transformation,” Int. J. of Technology Management, Vol.73, No.4, pp. 176-205, 2017.
- [4] D. Egorov, A. Levina, S. Kalyazina, P. Schuur, and B. Gerrits, “The challenges of the logistics industry in the era of digital transformation,” Int. Conf. on Technological Transformation: A New Role for Human, Machines and Management, pp. 201-209, 2020.
- [5] S. G. Moulic, S. Singh, R. Hussain, G. Murthy, Y. Khawade, and N. Bettaiah, “Digital transformation and 3D printing of transtibial load-bearing prosthesis in India: Recent advances, challenges and future perspectives,” J. of 3D Printing in Medicine, Vol.3, No.4, pp. 185-193, 2019.
- [6] G. Motta, D. Sacco, T. Ma, L. You, and K. Liu, “Personal mobility service system in urban areas: The IRMA project,” 2015 IEEE Symp. on Service-Oriented System Engineering, pp. 88-97, 2015.
- [7] S. Baba, “The super-aged society,” World Health, Vol.46, No.3, pp. 9-11, 1993.
- [8] T. Suzuki, “Health status of older adults living in the community in Japan: Recent changes and significance in the super-aged society,” Geriatrics & Gerontology Int., Vol.18, No.5, pp. 667-677, 2018.
- [9] N. Imaoka, K. Kitazawa, M. Kamezaki, S. Sugano, and T. Ando, “Autonomous Mobile Robot Moving Through Static Crowd: Arm with One-DoF and Hand with Involute Shape to Maneuver Human Position,” J. Robot. Mechatron., Vol.32, No.1, pp. 59-67, 2020.
- [10] M. Nakamura, K. Okajima, Y. Matsumoto, T. Tanaka, K. Iijima, and M. Nihei, “Effectiveness of Continuous Grip Strength Measurement Using Social Assistive Robots on Older Adults at Home,” J. Robot. Mechatron., Vol.33, No.4, pp. 719-729, 2021.
- [11] A. Aronsson, “Professional women and elder care in contemporary Japan: Anxiety and the move toward technocare,” Anthropology and Aging, Vol.43, No.1, pp. 17-34, 2022.
- [12] A. Deguchi, C. Hirai, H. Matsuoka, T. Nakano, K. Oshima, M. Tai, and S. Tani, “What is society 5.0?,” Society 5.0, pp. 1-23, Springer, 2020.
- [13] L. Fiorini, M. D. Mul, I. Fabbricotti, R. Limosani, A. Vitanza, G. D’Onofrio, M. Tsui, D. Sancarlo, F. Giuliani, A. Greco, D. Guiot, E. Senges, and F. Cavallo, “Assistive robots to improve the independent living of older persons: Results from a needs study,” Disability and Rehabilitation: Assistive Technology, Vol.16, No.1, pp. 92-102, 2021.
- [14] Y. Lu, H. Zheng, S. Chand, W. Xia, Z. Liu, X. Xu, L. Wang, Z. Qin, and J. Bao, “Outlook on human-centric manufacturing towards Industry 5.0,” J. of Manufacturing Systems, Vol.62, pp. 612-627, 2022.
- [15] E. Sato-Shimokawara and T. Yamaguchi, “Community-centric system – support of human ties –,” J. Robot. and Mechatron., Vol.29, No.1, pp. 7-13, 2017.
- [16] J. Botzheim, Y. Takama, E. Sato-Shimokawara, N. Kubota, and T. Yamaguchi, “From human-centric systems to community-centric systems,” Int. J. of Artificial Life Research (IJALR), Vol.7, No.1, 2017. http://doi.org/10.4018/IJALR.2017010101
- [17] S. Yamamoto, J. Woo, W. H. Chin, K. Matsumura, and N. Kubota, “Interactive Information Support by Robot Partners Based on Informationally Structured Space,” J. Robot. Mechatron., Vol.32, No.1, pp. 236-243, 2020.
- [18] Y. Li and T. Voege, “Mobility as a service (MaaS): Challenges of implementation and policy required,” J. of Transportation Technologies, Vol.7, No.2, pp. 95-106, 2017.
- [19] N. Tomokuni and M. Shino, “Wheeled inverted-pendulum-type personal mobility robot with collaborative control of seat slider and leg wheels,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5367-5372, 2012.
- [20] S. Desai, S. S. Mantha, and V. M. Phalle, “Advances in smart wheelchair technology,” 2017 Int. Conf. on Nascent Technologies in Engineering (ICNTE), 2017. https://doi.org/10.1109/ICNTE.2017.7947914
- [21] J. Woo, Y. Ohyama, and N. Kubota, “An Expansion and Application of Human Coexistence Robot System Using Smart Devices,” J. Adv. Comput. Intell. Intell. Inform., Vol.25, No.2, pp. 234-241, 2021.
- [22] J. Woo, Y. Ohyama, and N. Kubota, “Robot partner development platform for human-robot interaction based on a user-centered design approach,” Applied Sciences, Vol.10, No.22, Article No.7992, 2020.
- [23] J. Woo and N. Kubota, “Interaction content design for information support based on robot partner,” 2017 10th Int. Conf. on Human System Interactions (HSI), pp. 155-160, 2017.
- [24] S. Shao, J. Woo, K. Yamamoto, and N. Kubota, “Elderly Health Care System Based on High Precision Vibration Sensor,” 2019 Int. Conf. on Machine Learning and Cybernetics (ICMLC), 2019. https://doi.org/10.1109/ICMLC48188.2019.8949237
- [25] K. Tanaka, K. Matsunaga, and H. Wang, “Electroencephalogram-Based Control of an Electric Wheelchair,” IEEE Trans. on Robotics, Vol.21, No.4, pp. 762-766, 2005.
- [26] D. Purwanto, R. Mardiyanto, and K. Arai, “Electric Wheelchair Control with Gaze Direction and Eye Blinking,” Artificial Life and Robotics, Vol.14, pp. 397-400, 2009.
- [27] J. Woo, K. Yamaguchi, and Y. Ohyama, “Development of a Control System and Interface Design Based on an Electric Wheelchair,” J. Adv. Comput. Intell. Intell. Inform., Vol.25, No.5, pp. 655-663, 2021.
- [28] J. Choi and R. Gutierrez-Osuna, “Using heart rate monitors to detect mental stress,” 2009 6th Int. Workshop on Wearable and Implantable Body Sensor Networks, pp. 219-223, 2009.
- [29] J. Abdur-Rahim, Y. Morales, P. Gupta, I. Umata, A. Watanabe, J. Even, T. Suyama, and S. Ishii, “Multi-sensor based state prediction for personal mobility vehicles,” PLOS ONE, Vol.11, No.10, Article No.e0162593, 2016.
- [30] H. Hashimoto, D. Takeda, Y. Ohyama, C. Ishii, M. Niitsuma, and H. Hashimoto, “Psychological Evaluation of Frisky Robot Motion,” IEEJ Trans. on Electronics, Information and Systems, Vol.126, No.1, pp. 83-90, 2006.
- [31] M. Babiuch, P. Foltỳnek, and P. Smutnỳ, “Using the ESP32 microcontroller for data processing,” 2019 20th Int. Carpathian Control Conf. (ICCC), 2019. https://doi.org/10.1109/CarpathianCC.2019.8765944
- [32] J. Woo, T. Sato, K. Abe, and Y. Ohyama, “Development of IoT Measurement System Integrated with Robotic Personal Mobility Systems,” 2022 Joint 12th Int. Conf. on Soft Computing and Intelligent Systems and 23st Int. Symp. on Advanced Intelligent Systems (SCIS&ISIS), 2022. https://doi.org/10.1109/SCISISIS55246.2022.10001955
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.