Paper:
Design of a Database-Driven Assist Control for a Hydraulic Excavator Considering Human Operation
Kei Hiraoka*, Toru Yamamoto*, Masatoshi Kozui**, Kazushige Koiwai**, and Koji Yamashita**
*Graduate School of Advanced Science and Engineering, Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan
**KOBELCO Construction Machinery Co., Ltd.
2-1 Itsukaichikou 2-chome, Saeki-ku, Hiroshima 731-5161, Japan

In recent years, there has been strong focus on sustainable development goals (SDGs). In Japan, Society 5.0, which is proposed as a future vision to be achieved towards the realization of SDGs, is being promoted by various organizations. In particular, “i-Construction” is being promoted in the construction industry. As a result, hydraulic excavators are becoming increasingly automated and semi-automated. Furthermore, if operators achieve high productivity, it helps them maintain a sense of accomplishment and motivation to work. In this study, a control system that results in the desired output is proposed for a hydraulic excavator; in this system, the degree of interference depends on the human input and controller input. Attachments on hydraulic excavators cause interference owing to the characteristics of the hydraulic system. Therefore, a control system that can adaptively adjust the controller input to the human operation, considering the interference with information caused by human operation stored in the database, was constructed. The proposed method was implemented on a hydraulic excavator and its effectiveness was verified.
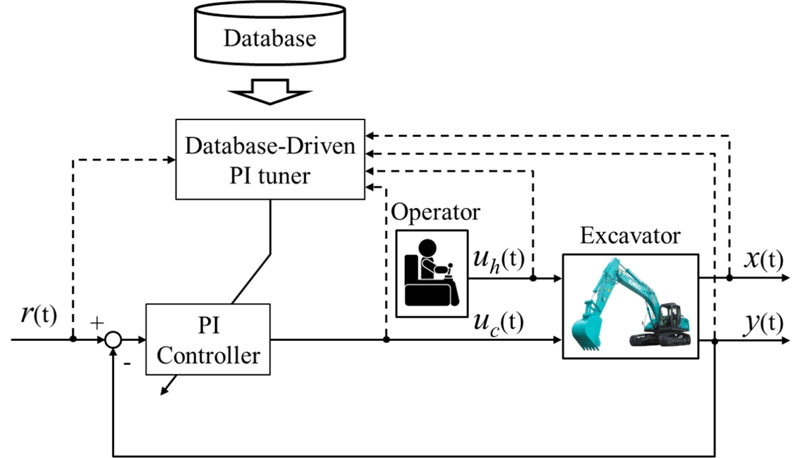
Block diagram of the proposed control system
- [1] M. Kozui, T. Yamamoto, H. Yoshihara, K. Koiwai, and K. Yamashita, “Design of a Database-Driven Excavation Assist Controller Based on the Velocity of the Center-of-Mass for a Hydraulic Excavator,” IEEE Access, Vol.9, pp. 64776-64784, 2021.
- [2] S. Soma, O. Kaneko, and T. Fujii, “A new method of controller parameter tuning based on input-output data – Fictitious Reference Iterative Tuning (FRIT) –,” IFAC Workshop on Adaptation and Learning in Control and Signal Processing, and IFAC Workshop on Periodic Control Systems, Vol.37, No.12, pp. 789-794, 2004.
- [3] K. Hayashi and T. Yamamoto, “Design of a Data-Oriented Multivariable PID Control System,” IEEJ Trans. on Electronics, Information and Systems, Vol.133, No.12, pp. 2229-2235, 2013 (in Japanese).
- [4] T. Yamamoto and S. L. Shah, “Design and Experimental Evaluation of a Multivariable Self-Tuning PID Controller,” IEE Proc. of Control Theory and Applications, Vol.151, No.5, pp. 645-652, 2004.
- [5] T. Yamamoto, H. Ishihara, S. Omatsu, and T. Kitamori, “A Construction of Multivariable Self-Tuning Controller with Two-Degree-of-Freedom PID Structure for Discrete-Time System,” Trans. of the Society of Instrument and Control Engineers, Vol.28, No.4, pp. 484-491, 1992 (in Japanese).
- [6] J. A. Nelder and R. Mead, “A simplex method for function minimization,” Computer J., Vol.7, pp. 308-313, 1965.
- [7] F. C. Gao and L. X. Han, “Implementing the Nelder-Mead simplex algorithm with adaptive parameters,” Computational Optimization and Applications, Vol.51, pp. 259-277, 2012.
- [8] D. E. Goldberg, “Genetic Algorithm Search Optimization,and Machine Learning,” Addison Weslay Publishing Company Inc., 1989.
- [9] N. Hansen, “The CMA evolution strategy: A comparing review,” Towards a New Evolutionary computation, pp. 75-102, 2006.
- [10] C. G. Atkeson, A. W. Moore, and S. Schaal, “Locally weighted learning for control,” Artificial Intelligence Review, Vol.9, No.11, pp. 75-114, 1997.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.