Paper:
Support Effect and Simulation Evaluation of Lifting Motion Using Non-Wearing Type Power Assist Device
Masashi Yokota* and Masahiro Takaiwa**
*Faculty of Information Science and Engineering, Okayama University of Science
1-1 Ridaicho, Kita-ku, Okayama, Okayama 700-0005, Japan
**Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijosanjima, Tokushima 770-8506, Japan

One of the serious problems that Japan has been facing is its growing aging society, which causes a shortage of young workers in the nursing field to support care recipients and in other industries that require heavy labor. Many workers in these workplaces experience back pain. To reduce the burden on the lower back, the squat method is generally recommended when workers lift heavy objects. Many assist devices have been developed to reduce the burden on the body; however, most wearing type devices have difficulty performing the squat method owing to their mechanical constraints. In a previous study, we developed a non-wearing type pneumatic power assist device that considers the squat method and evaluated its support effects during a simple lifting motion. In this study, we developed a passive type assist device and a previously developed active type device and quantitatively evaluated their effectiveness in lifting motions. In addition, we analyzed muscle activity using a musculoskeletal simulator.
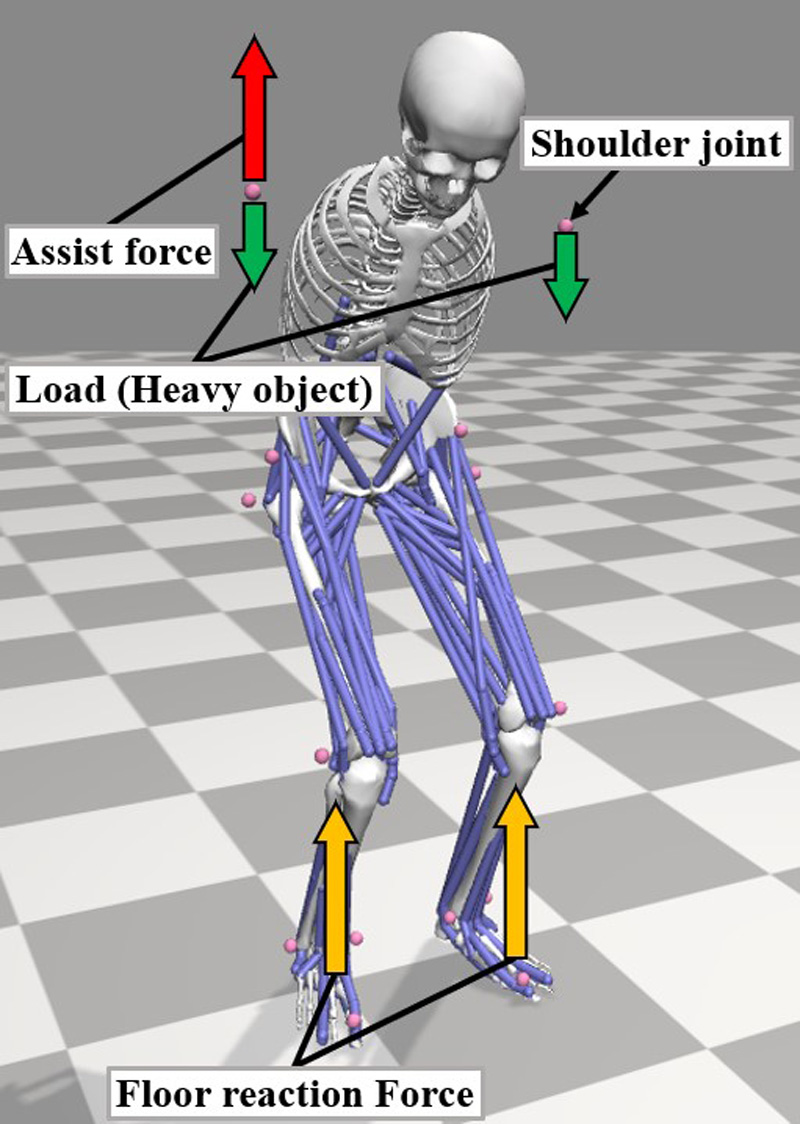
Simulation of lifting motion
- [1] Ministry of Internal Affairs and Communications, Japan, “White Paper: Information and Communications in Japan,” 2016 (in Japanese).
- [2] Ministry of Health, Labour and Welfare, “Occupational Disease Occurrence Survey Report,” 2018 (in Japanese).
- [3] Ministry of Health, Labour and Welfare, “Low Back Pain Prevention Guidelines in the Workplace,” 2013 (in Japanese).
- [4] K. Naminohira and M. Fujimura, “Electromyographic and Kinematical Study of Human Lifting Motion —Effect of Mass of Heavy Object on Motion Methods—,” Japanese J. of Occupational Medicine and Traumatology, Vol.58, No.5, pp. 234-239, 2010 (in Japanese).
- [5] K. Naminohira, M. Fujimura, and K. Shinkoda, “Electromyographic and Kinematic Study of Lifting Motion in Male Adults —Effects of Mass of the Object on Motion Patterns (The Second Report)—,” Japanese J. of Occupational Medicine and Traumatology, Vol.59, No.5, pp. 245-250, 2011 (in Japanese).
- [6] M. Fujimura and I. Nara, “The Influence on Lumbago in Lifting Weights Measured by Electrocardiography,” Japanese J. of Occupational Medicine and Traumatology, Vol.52, No.6, pp. 341-347, 2004 (in Japanese).
- [7] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Motion-Based-Design of Elastic Material for Passive Assistive Device Using Musculoskeletal Model,” J. Robot. Mechatron., Vol.23, No.6, pp. 978-990, 2011.
- [8] Y.-T. Liao, T. Ishioka, K. Mishima, C. Kanda, K. Kodama, and E. Tanaka, “Development and Evaluation of a Close-Fitting Assistive Suit for Back and Arm Muscle – e.z.UP® –,” J. Robot. Mechatron., Vol.32, No.1, pp. 157-172, 2020.
- [9] M. Kashima, H. Arakawa, S. Kimura, R. Nishihama, K. Yokoyama, I. Kikutani, and T. Nakamura, “Development of Assist Suit for Squat Lifting Support Considering Gait and Quantitative Evaluation by Three-Dimensional Motion Analysis,” J. Robot. Mechatron., Vol.32, No.1, pp. 209-219, 2020.
- [10] M. Ide, T. Hashimoto, K. Matsumoto, and H. Kobayashi, “Evaluation of the Power Assist Effect of Muscle Suit for Lower Back Support,” IEEE Access, Vol.9, pp. 3249-3260, 2021.
- [11] H. Satoh, T. Kawabata, F. Tanaka, and Y. Sankai, “Transferring-Care Assistance with Robot Suit HAL,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.76, No.762, pp. 227-235, 2010 (in Japanese).
- [12] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study of Power-Assist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. Robot. Mechatron., Vol.28, No.6, pp. 949-957, 2016.
- [13] S. Mamiya, T. Takahashi, and N. Uchiyama, “Design and Experimental Verification of a Pantograph-Based Mechanism for Lower Limb Load Reduction by Compensating for Upper Body Weight,” J. Robot. Mechatron., Vol.30, No.1, pp. 33-42, 2018.
- [14] M. Yokota and M. Takaiwa, “Development of Non-Wearing Type Pneumatic Power Assist Device – Basic Concept and Performance Evaluation –,” J. Robot. Mechatron., Vol.32, No.5, pp. 1052-1060, 2020.
- [15] M. Yokota and M. Takaiwa, “Gait Rehabilitation System Using a Non-Wearing Type Pneumatic Power Assist Device,” J. Robot. Mechatron., Vol.33, No.4, pp. 927-934, 2021.
- [16] Ministry of Health, Labour and Welfare, “National Health and Nutrition Survey Report,” 2017 (in Japanese).
- [17] D. B. Chaffin and G. B. J. Andersson, “Occupational Biomechanics,” Wiley, 1984.
- [18] M. Takaiwa and T. Noritsugu, “Positioning Control of Pneumatic Parallel Manipulator,” Int. J. Automation Technol., Vol.2, No.1, pp. 49-55, 2008.
- [19] T. Morikawa, “What Could We Confirm in Confirmatory Clinical Trials? —From the View Point of Statistical Power and Sample Size—,” Japanese J. of Biometrics, Vol.29, Special Issue 1, pp. S99-S105, 2008 (in Japanese).
- [20] S. L. Delp, F. C. Anderson, A. S. Arnold, P. Loan, A. Habib, C. T. John, E. Guendelman, and D. G. Thelen, “OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement,” IEEE Trans. on Biomedical Engineering, Vol.54, No.11, pp. 1940-1950, 2007.
- [21] M. Damsgaard, J. Rasmussen, S. T. Christensen, E. Surma, and M. de Zee, “Analysis of musculoskeletal Systems in the AnyBody Modeling System,” Simulation Modelling Practice and Theory, Vol.14, No.8, pp. 1100-1111, 2006.
- [22] M. Yamamoto, K. Shimatani, M. Hasegawa, T. Murata, K. Okamura, and Y. Kurita, “Comparison Estimate Muscle Activity and Electromyogram on the Gait with Ankle Foot Orthosis by a Musculoskeletal Model,” J. of the Society of Biomechanisms, Vol.41, No.4, pp. 213-219, 2017 (in Japanese).
- [23] Y. Kobayashi, A. Saito, S. Kizawa, and K. Miyawaki, “Musculoskeletal Model to Evaluate Muscle Forces During Namba Walking,” J. of the Society of Biomechanisms, Vol.45, No.3, pp. 188-191, 2021 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.