Paper:
Development of a Spherical Shell Robot with Rolling and Legged Locomotion
Ryo Abe and Chisato Kanamori
The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

Herein, we propose a spherical shell robot that can roll and move on its legs, and develop a prototype of the robot. Recently, there has been a growing demand for robots that can move freely and gather information on rough terrains, such as disaster sites, which are not accessible to humans. The robot developed here has two types of mobilities: rolling movement using a spherical shape and walking movement using its legs. Because the morphological transformation does not require recombination of parts, it can be reversibly performed via remote control. Therefore, the robot can select the movement method according to the environment, and reach the target point reliably even on uneven terrains, such as a disaster site. We designed a mechanism that enabled the transformation of the form and devised an operation method. Accordingly, a prototype was developed and tested. A rolling test on flat ground confirmed that the robot can roll over 5.0 m and its speed could be controlled using a gyro sensor. The leg locomotion test confirmed that the robot can turn and move straight ahead without turning over. In addition, we also conducted experiments, such as sudden stops and remote morphological deformation, to confirm the operation of the robot during rolling.
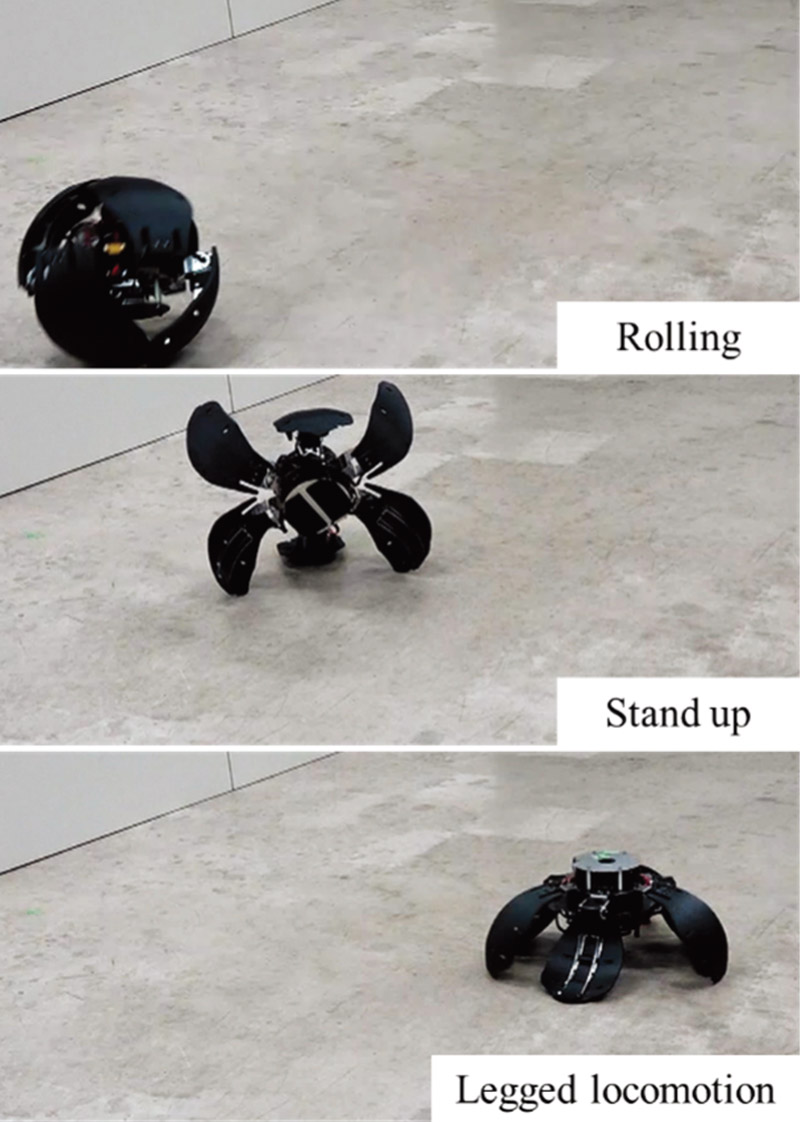
Motion of spherical shell robot
- [1] E. Rohmer, K. Ohno, T. Yoshida, K. Nagatani, E. Konayagi, and S. Tadokoro, “Integration of a Sub-Crawlers’ Autonomous Control in Quince Highly Mobile Rescue Robot,” 2010 IEEE/SICE Int. Symp. on System Integration, pp. 78-83, 2010.
- [2] R. H. Armour and J. F. V. Vincent, “Rolling in Nature and Robotics: A Review,” J. of Bionic Engineering, Vol.3, No.4, pp. 195-208, 2006.
- [3] A. Halme, T. Schonberg, and Y. Wang, “Motion Control of a Spherical Mobile Robot,” Proc. of 4th IEEE Int. Workshop on Advanced Motion Control (AMC’96-MIE), Vol.1, pp. 259-264, 1996.
- [4] J. Alves and J. Dias, “Design and Control of a Spherical Mobile Robot,” Proc. of the Institution of Mechanical Engineers, Part I, J. of Systems & Control Engineering, Vol.217, No.6, pp. 457-67, 2003.
- [5] A. Bicchi, A. Balluchi, D. Prattichizzo, and A. Gorelli, “Introducing the ‘Sphericle’: An Experimental Testbed for Research and Teaching in Nonholonomy,” Proc. of Int. Conf. on Robotics and Automation, Vol.3, pp. 2620-2625, 1997.
- [6] Q. Zhan, Y. Cai, and C. Yan, “Design, Analysis and Experiments of an Omni-Directional Spherical Robot,” 2011 IEEE Int. Conf. on Robotics and Automation, pp. 4921-4926, 2011.
- [7] A. Javadi, A. Homayoun, and P. Mojabi, “Introducing Glory: A Novel Strategy for an Omnidirectional Spherical Rolling Robot,” J. of Dynamic Systems, Measurement and Control, Vol.126, No.3, pp. 678-683, 2004.
- [8] V. Kaznov and M. Seeman, “Outdoor Navigation with a Spherical Amphibious Robot,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5113-5118, 2010.
- [9] J.-C. Yoon, S.-S. Ahn, and Y.-J. Lee, “Spherical Robot with New Type of Two-Pendulum Driving Mechanism,” 2011 15th IEEE Int. Conf. on Intelligent Engineering Systems, pp. 275-279, 2011.
- [10] B. Chemel, E. Mutschler, and H. Schempf, “Cyclops: Miniature Robotic Reconnaissance System,” Proc. 1999 IEEE Int. Conf. on Robotics and Automation (Cat. No.99CH36288C), Vol.3, pp. 2298-2302, 1999.
- [11] F. Michaud, J.-F. Laplante, H. Larouche, A. Duquette, S. Caron, D. Letourneau, and P. Masson, “Autonomous Spherical Mobile Robot for Child-Development Studies,” IEEE Trans. on Systems, Man, and Cybernetics – Part A: Systems and Humans, Vol.35, No.4, pp. 471-480, 2005.
- [12] D. Liu, H. Sun, Q. Jia, and L. Wang, “Motion Control of a Spherical Mobile Robot by Feedback Linearization,” 2008 7th World Congress on Intelligent Control and Automation, pp. 965-970, 2008.
- [13] M. Svinin, A. Morinaga, and M. Yamamoto, “On the Dynamic Model and Motion Planning for a Class of Spherical Rolling Robots,” 2012 IEEE Int. Conf. on Robotics and Automation, pp. 3226-3231, 2012.
- [14] S. Bhattacharya and S. K. Agrawal, “Spherical Rolling Robot: A Design and Motion Planning Studies,” IEEE Trans. on Robotics and Automation: A Publication of the IEEE Robotics and Automation Society, Vol.16, No.6, pp. 835-839, 2000.
- [15] T. Urakubo, M. Osawa, H. Tamaki, Y. Tada, and S. Maekawa, “Development of a Spherical Rolling Robot Equipped with a Gyro,” 2012 IEEE Int. Conf. on Mechatronics and Automation, pp. 1602-1607, 2012.
- [16] Y. Sugiyama, A. Shiotsu, M. Yamanaka, and S. Hirai, “Circular/Spherical Robots for Crawling and Jumping,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 3595-3600, 2005.
- [17] A. Takeshi and K. Ogihara, “Design of Quadruped Walking Robot with Spherical Shell,” Proc. of Int. Conf. on Design Engineering and Science, pp. 116-121, 2014.
- [18] T. Aoki, S. Ito, and Y. Sei, “Development of Quadruped Walking Robot with Spherical Shell-Mechanical Design for Rotational Locomotion,” 2015 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 5706-5711, 2015.
- [19] M. Kovač, M. Schlegel, J.-C. Zufferey, and D. Floreano, “A Miniature Jumping Robot with Self-Recovery Capabilities,” 2009 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 583-588, 2009.
- [20] S. Chiba and T. Aoki, “Development of Quadruped robot with Spherical Shell (Realization of locomotion by kicking),” Proc. of ICDES 2017, Article No.253, 2017.
- [21] N. Bunathuek, P. Saisutjarit, and P. Laksanacharoen, “Design of a Reconfigurable Spherical Robot II,” The 4th Annual IEEE Int. Conf. on Cyber Technology in Automation, Control and Intelligent, pp. 62-66, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.