Paper:
Localization System for Vehicle Navigation Based on GNSS/IMU Using Time-Series Optimization with Road Gradient Constrain
Aoki Takanose*, Kaito Kondo**, Yuta Hoda**, Junichi Meguro**, and Kazuya Takeda*
*Graduate School of Informatics, Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
**Department of Mechatronics Engineering, Graduate School of Science and Technology, Meijo University
1-501 Shiogamaguchi, Tempaku-ku, Nagoya, Aichi 468-8502, Japan

In this paper, we propose a GNSS/IMU localization system for mobile robots when wheel speed sensors cannot be attached. Highly accurate location information is required for autonomous navigation of mobile robots. A typical method of acquiring location information is to use a Kalman filter for position estimation. The Kalman filter is a maximum-likelihood estimation method that assumes normally distributed noise. However, non-normally distributed GNSS multipath noise that frequently occurs in urban environments causes the Kalman filter to break down, and degrades the estimation performance. Other GNSS/IMU localization methods capable of lane-level estimation in urban environments use wheel speed sensors, which are unsuitable for the present situation. In this study, we aim to improve the performance of lane-level localization by adding a vehicle speed estimation function to adapt the method to those requiring wheel speed sensors. The proposed method optimizes time-series data to accurately compensate for accelerometer bias errors and reduce GNSS multipath noise. The evaluation confirmed the effectiveness of the proposed method, with improved velocity and position estimation performance compared with the Kalman filter method.
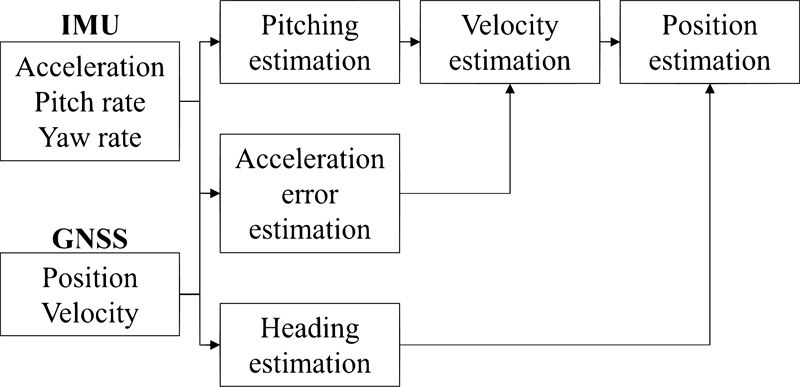
Block diagram of the proposed method
- [1] S. Boric, E. Schiebel, C. Schloegl, M. Hildebrandt, C. Hofer, D. Macht, and B. Obrenovic, “Research in autonomous driving – a historic bibliometric view of the research development in autonomous driving,” Int. J. of Innovation and Economic Development, Vol.7, No.5, pp. 27-44, 2021.
- [2] T. Litman, “Autonomous vehicle implementation predictions: Implications for transport planning,” Victoria Transport Policy Institute, pp. 1-49, 2017.
- [3] E. Yurtsever, J. Lambert, A. Carballo, and K. Takeda, “A survey of autonomous driving: Common practices and emerging technologies,” IEEE Access, Vol.8, pp. 58443-58469, 2020.
- [4] T. Zavodjančík, G. Kasanický, and L. Demčáková, “Reduction of pedestrian accidents – automated road vehicles,” Transportation Research Procedia: 14th Int. Scientific Conf. on Sustainable, Modern and Safe Transport Proc., Vol.55, pp. 1605-1612, 2021.
- [5] H. Yu, R. Jiang, Z. He, Z. Zheng, L. Li, R. Liu, and X. Chen, “Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives,” Transportation Research Part C: Emerging Technologies, Vol.127, Article No.103101, 2021.
- [6] T. J. Crayton and B. M. Meier, “Autonomous vehicles: Developing a public health research agenda to frame the future of transportation policy,” J. of Transport & Health, Vol.6, pp. 245-252, 2017.
- [7] F. Munir, S. Azam, M. I. Hussain, A. M. Sheri, and M. Jeon, “Autonomous vehicle: The architecture aspect of self driving car,” Proc. of the 2018 Int. Conf. on Sensors, Signal and Image Processing (SSIP 2018), pp. 1-5, 2018.
- [8] L. Xu, Y. Wang, H. Sun, J. Xin, and N. Zheng, “Design and implementation of driving control system for autonomous vehicle,” 17th Int. IEEE Conf. on Intelligent Transportation Systems (ITSC), pp. 22-28, 2014.
- [9] S. Kato, S. Tokunaga, Y. Maruyama, S. Maeda, M. Hirabayashi, Y. Kitsukawa, A. Monrroy, T. Ando, Y. Fujii, and T. Azumi, “Autoware on board: Enabling autonomous vehicles with embedded systems,” 2018 9th ACM/IEEE Int. Conf. on Cyber-Physical Systems (ICCPS), pp. 287-296, 2018.
- [10] J. Ziegler, P. Bender, M. Schreiber, H. Lategahn, T. Strauss, C. Stiller, T. Dang, U. Franke, N. Appenrodt, C. G. Keller, E. Kaus, R. G. Herrtwich, C. Rabe, D. Pfeiffer, F. Lindner, F. Stein, F. Erbs, M. Enzweiler, C. Knöppel, J. Hipp, M. Haueis, M. Trepte, C. Brenk, A. Tamke, M. Ghanaat, M. Braun, A. Joos, H. Fritz, H. Mock, M. Hein, and E. Zeeb, “Making bertha drive – an autonomous journey on a historic route,” IEEE Intelligent Transportation Systems Magazine, Vol.6, No.2, pp. 8-20, 2014.
- [11] N. Matsuzaki and S. Mikami, “Self-localization of the autonomous robot for view-based navigation using street view images,” J. Robot. Mechatron., Vol.34, No.4, pp. 887-896, 2022.
- [12] S. Pang, D. Kent, X. Cai, H. Al-Qassab, D. Morris, and H. Radha, “3D scan registration based localization for autonomous vehicles – A comparison of NDT and ICP under realistic conditions,” 2018 IEEE 88th Vehicular Technology Conf. (VTC-Fall), pp. 1-5, 2018.
- [13] H. Kurita, M. Oku, T. Nakamura, T. Yoshida, and T. Fukao, “Localization method using camera and LiDAR and its application to autonomous mowing in orchards,” J. Robot. Mechatron., Vol.34, No.4, pp. 877-886, 2022.
- [14] S. Hoshino and H. Yagi, “Mobile robot localization using map based on cadastral data for autonomous navigation,” J. Robot. Mechatron., Vol.34, No.1, pp. 111-120, 2022.
- [15] K. Funato, R. Tasaki, H. Sakurai, and K. Terashima, “Development and experimental verification of a person tracking system of mobile robots using sensor fusion of inertial measurement unit and laser range finder for occlusion avoidance,” J. Robot. Mechatron., Vol.33, No.1, pp. 33-43, 2021.
- [16] A. Takanose, Y. Kitsukawa, J. Megruo, E. Takeuchi, A. Carballo, and K. Takeda, “Eagleye: A lane-level localization using low-cost GNSS/IMU,” 2021 IEEE Intelligent Vehicles Symp. Workshops (IV Workshops), pp. 319-326, 2021.
- [17] G. Falco, M. Pini, and G. Marucco, “Loose and tight GNSS/INS integrations: Comparison of performance assessed in real urban scenarios,” Sensors, Vol.17, No.2, Article No.255, 2017.
- [18] T. Tominaga and N. Kubo, “Performance assessment of adaptive Kalman filter-based GNSS PVT and integrity in dense urban environment,” Trans. of Navigation, Vol.4, No.2, pp. 49-58, 2019.
- [19] S. Thrun, W. Burgard, and D. Fox, “Probabilistic robotics,” MIT Press, Cambridge, Mass., 2005.
- [20] H. Benzerrouk and A. Nebylov, “Robust nonlinear filtering applied to integrated navigation system INS/GNSS under non Gaussian measurement noise effect,” 2012 IEEE Aerospace Conf., pp. 1-8, 2012.
- [21] J.-A. Ting, E. Theodorou, and S. Schaal, “A Kalman filter for robust outlier detection,” 2007 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1514-1519, 2007.
- [22] G. Chang, “Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion,” J. of Geodesy, Vol.88, No.4, pp. 391-401, 2014.
- [23] J. W. Song and C. G. Park, “Enhanced pedestrian navigation based on course angle error estimation using cascaded Kalman filters,” Sensors, Vol.18, No.4, Article No.1281, 2018.
- [24] K. Takeyama, Y. Kojima, and E. Teramoto, “Trajectory estimation improvement based on time-series constraint of GPS Doppler and INS in urban areas,” Proc. of the 2012 IEEE/ION Position, Location and Navigation Symp., pp. 700-705, 2012.
- [25] S. Verhagen and P. J. G. Teunissen, “The ratio test for future GNSS ambiguity resolution,” GPS Solut., Vol.17, No.4, pp. 535-548, 2013.
- [26] R. Furukawa, N. Kubo, and A. El-Mowafy, “Verification of GNSS multipath and positioning in urban areas using 3D maps,” IEICE Communications Express, Vol.9, No.11, pp. 529-534, 2020.
- [27] W. Wen, T. Pfeifer, X. Bai, and L.-T. Hsu, “Factor graph optimization for GNSS/INS integration: A comparison with the extended Kalman filter,” NAVIGATION: J. of the Institute of Navigation, Vol.68, No.2, pp. 315-331, 2021.
- [28] H. Zhang, X. Xia, M. Nitsch, and D. Abel, “Continuous-time factor graph optimization for trajectory smoothness of GNSS/INS navigation in temporarily GNSS-denied environments,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 9115-9122, 2022.
- [29] O. Vouch, A. Minetto, G. Falco, and F. Dovis, “On the adaptivity of unscented particle filter for GNSS/INS tightlyintegrated navigation unit in urban environment,” IEEE Access, Vol.9, pp. 144157-144170, 2021.
- [30] H. Zhang, X. Xia, M. Nitsch, and D. Abel, “Continuous-time factor graph optimization for trajectory smoothness of GNSS/INS navigation in temporarily GNSS-denied environments,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 9115-9122, 2022.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.