Paper:
Study on Collision Avoidance Strategies Based on Social Force Model Considering Stochastic Motion of Pedestrians in Mixed Traffic Scenario
Yan Zhang*
 , Xun Shen**
, and Pongsathorn Raksincharoensak*
, Xun Shen**
, and Pongsathorn Raksincharoensak*
*Department of Mechanical Systems Engineering, Graduate School of Engineering, Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan
**Department of Systems and Control Engineering, Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8552, Japan

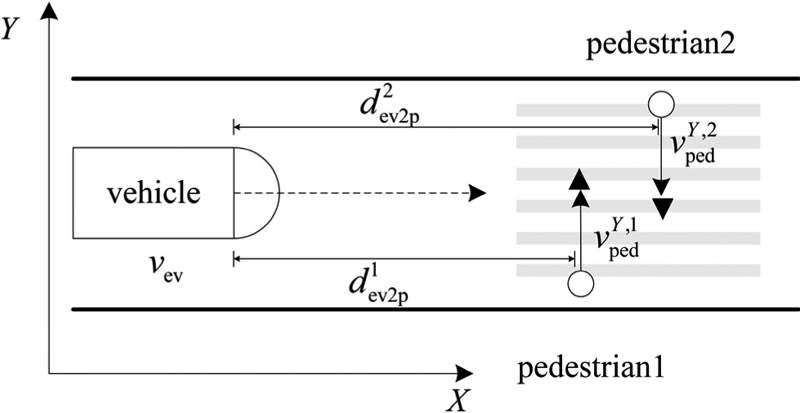
In typical traffic scenarios where there are no clear separations between the traffic participants, such as mixed traffic or shared space, vehicles and pedestrians are usually moving in the same time so that ego vehicle may need to face with multiple pedestrians in a relatively short interaction distance. Considering the stochastic motion of pedestrians and to balance the time consumption and safety during passing process, this paper proposes two strategies of collision avoidance (CA) for ego vehicle, which are based on model predictive control (MPC) and social force model (SFM). Besides, a modified SFM-based pedestrian model that considers the stochastic motion is given to evaluate the effectiveness of the proposed strategies. For MPC-based CA strategy, considering the unpredictable motion of the pedestrians, a novel speed re-planning layer combined with collision probability estimation, which is used to calculate an acceptable maximum safe speed for ego vehicle, is proposed. On the other hand, parameters associated with the SFM-based vehicle model are re-calibrated by particle swarm optimization (PSO) and the calibration process has been analyzed physically in details. The recommended values based on different initial interaction speed and distance of vehicle and pedestrians are also determined for further reference as useful findings from the analysis.
A novel CA strategy for an ego vehicle
- [1] Z.-W. Qu et al., “Modeling electric bike-car mixed flow via social force model,” Advances in Mechanical Engineering, Vol.9, No.9, 2017. https://doi.org/10.1177/1687814017719641
- [2] B. Hamilton-Baillie, “Towards shared space,” URBAN DESIGN Int., Vol.13, No.2, pp. 130-138, 2008.
- [3] Department for Communities and Local Government, Government of the UK, “Re-imagining urban spaces to help revitalise our high streets,” 2012.
- [4] B. Anvari, M. G. H. Bell, A. Sivakumar, and W. Y. Ochieng, “Modelling shared space users via rule-based social force model,” Transportation Research Part C: Emerging Technologies, Vol.51, pp. 83-103, 2015.
- [5] Y. Hamaguchi and P. Raksincharoensak, “Automated steering control system for reverse parking maneuver of semi-trailer vehicles considering motion planning by simulation of feedback control system,” J. Robot. Mechatron., Vol.32, No.3, pp. 561-570, 2020.
- [6] G. Habibi, N. Jaipuria, and J. P. How, “Context-aware pedestrian motion prediction in urban intersections,” arXiv: 1806.09453, 2018.
- [7] D. Helbing and P. Molnár, “Social force model for pedestrian dynamics,” Physical Review E, Vol.51, No.5, pp. 4282-4286, 1995.
- [8] T. Kretz, J. Lohmiller, and P. Sukennik, “Some indications on how to calibrate the social force model of pedestrian dynamics,” Transportation Research Record, Vol.2672, No.20, pp. 228-238, 2018.
- [9] C. Dias, M. Iryo-Asano, H. Nishiuchi, and T. Todoroki, “Calibrating a social force based model for simulating personal mobility vehicles and pedestrian mixed traffic,” Simulation Modelling Practice and Theory, Vol.87, pp. 395-411, 2018.
- [10] D. Yang, Ü. Özgüner, and K. Redmill, “A Social force based pedestrian motion model considering multi-pedestrian interaction with a vehicle,” ACM Trans. on Spatial Algorithms and Systems, Vol.6, No.2, Article No.11, 2020.
- [11] K. Ezawa, P. Raksincharoensak, and M. Nagai, “Hazard anticipatory autonomous braking control system based on 2-D pedestrian motion prediction,” J. Robot. Mechatron., Vol.27, No.6, pp. 636-644, 2015.
- [12] Y. Fujinami, P. Raksincharoensak, D. Ulbricht, and R. Adomat, “Risk predictive driver assistance system for collision avoidance in intersection right turns,” J. Robot. Mechatron., Vol.30, No.1, pp. 15-23, 2018.
- [13] S. Cheng, L. Li, Y.-G. Liu, W.-B. Li, and H.-Q. Guo, “Virtual fluid-flow-model-based lane-keeping integrated with collision avoidance control system design for autonomous vehicles,” IEEE Trans. on Intelligent Transportation Systems, Vol.22, No.10, pp. 6232-6241, 2020.
- [14] P. Falcone, F. Borrelli, J. Asgari, H. E. Tseng, and D. Hrovat, “Predictive active steering control for autonomous vehicle systems,” IEEE Trans. on Control Systems Technology, Vol.15, No.3, pp. 566-580, 2007.
- [15] A. Balachandran, M. Brown, S. M. Erlien, and J. C. Gerdes, “Predictive haptic feedback for obstacle avoidance based on model predictive control,” IEEE Trans. on Automation Science and Engineering, Vol.13, No.1, pp. 26-31, 2015.
- [16] Y. Zhang, X. Shen, and P. Raksincharoensak, “Automated vehicle’s overtaking maneuver with yielding to oncoming vehicles in urban area based on model predictive control,” Applied Sciences, Vol.11, No.19, Article No.9003, 2021.
- [17] M. Duguleana, F. G. Barbuceanu, A. Teirelbar, and G. Mogan, “Obstacle avoidance of redundant manipulators using neural networks based reinforcement learning,” Robotics and Computer-Integrated Manufacturing, Vol.28, No.2, pp. 132-146, 2012.
- [18] Y. Huang, “Intelligent technique for robot path planning using artificial neural network and adaptive ant colony optimization,” J. of Convergence Information Technology, Vol.7, No.9, pp. 246-252, 2012.
- [19] A. Chakravarthy and D. Ghose, “Generalization of the collision cone approach for motion safety in 3-D environments,” Autonomous Robots, Vol.32, No.3, pp. 243-266, 2012.
- [20] D. Yang and Ü. Özgüner, “Combining social force model with model predictive control for vehicle’s longitudinal speed regulation in pedestrian-dense scenarios,” arXiv: 1907.05178, 2019.
- [21] S. Lefèvre, D. Vasquez, and C. Laugier, “A survey on motion prediction and risk assessment for intelligent vehicles,” ROBOMECH J., Vol.1, No.1, Article No.1, 2014.
- [22] C. Feliciani et al., “A simulation model for non-signalized pedestrian crosswalks based on evidence from on field observation,” Intelligenza Artificiale, Vol.11, No.2, pp. 117-138, 2017.
- [23] A. Gorrini, L. Crociani, G. Vizzari, and S. Bandini, “Observation results on pedestrian-vehicle interactions at non-signalized intersections towards simulation,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol.59, Part A, pp. 269-285, 2018.
- [24] V. Vignali et al., “Effects of median refuge island and flashing vertical sign on conspicuity and safety of unsignalized crosswalks,” Transportation Research Part F: Traffic Psychology and Behaviour, Vol.60, pp. 427-439, 2019.
- [25] D. Yang, Ü. Özgüner, and K. Redmill, “Social force based microscopic modeling of vehicle-crowd interaction,” 2018 IEEE Intelligent Vehicles Symp. (IV), pp. 1537-1542, 2018. https://doi.org/10.1109/IVS.2018.8500499
- [26] J. Kennedy and R. Eberhart, “Particle swarm optimization,” Proc. of the Int. Conf. on Neural Network (ICNN’95), Vol.4, pp. 1942-1948, 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.