Paper:
Pedestrian Avoidance Method Considering Passenger Comfort for Autonomous Personal Mobility Vehicles
Hiroshi Yoshitake, Yosuke Isono, and Motoki Shino
Graduate School of Frontier Sciences, The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa, Chiba 277-8563, Japan

During the autonomous navigation of personal mobility vehicles (PMVs) in pedestrian spaces, avoiding collisions with pedestrians walking nearby is necessary. The avoidance paths of PMVs are affected by the behaviors of the pedestrians, which may also affect passenger comfort. Herein, a local path-planning method that considers passenger comfort to realize comfortable pedestrian avoidance during the autonomous navigation of PMVs in pedestrian spaces is proposed. First, the avoidance path and pedestrian behavior parameters affecting passenger comfort are investigated by evaluating passenger comfort in scenarios with different avoidance paths and pedestrian behaviors. Next, the requirements of a pedestrian avoidance method that considers passenger comfort are set based on the parameters affecting passenger comfort. Finally, a novel path-planning method that satisfies the requirements is proposed. The method is shown to generate comfortable paths in pedestrian spaces via a numerical simulation and participant experiment.
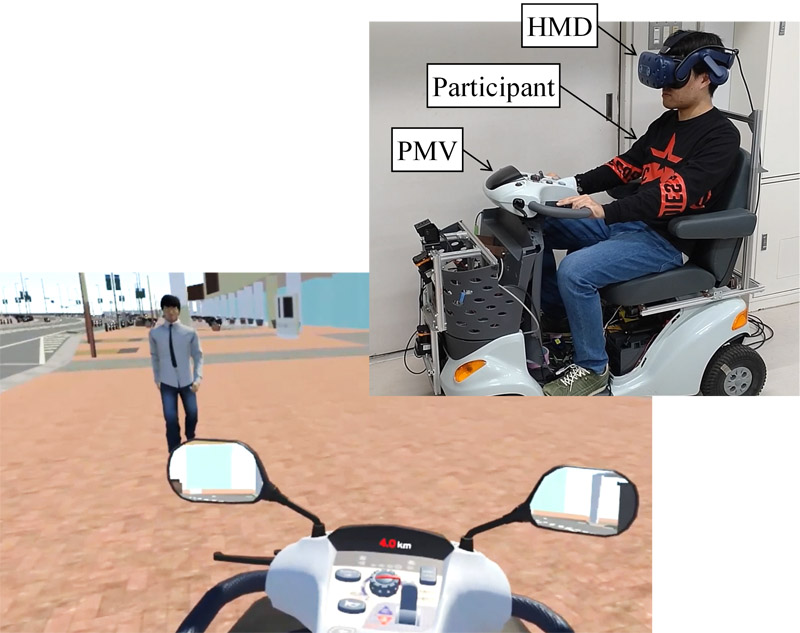
Equipment used for comfort evaluation
- [1] A. Brandt, S. Iwarsson, and A. Stahle, “Older people’s use of powered wheelchairs for activity and participation,” J. Rehabil. Med., Vol.36, No.2, pp. 70-77, 2004.
- [2] J. Okuno, T. Nishijima, and S. Kuno, “The relationship between physical fitness and index of competence and general health questionnaire in the housebound elderly,” Jpn. J. Phys. Fitness Sports Med., Vol.52, No.Supplement, pp. 237-247, 2003 (in Japanese).
- [3] S. Desai, S. S. Mantha, and V. M. Phalle, “Advances in smart wheelchair technology,” Proc. of 2017 Int. Conf. Nascent Technol. Eng., pp. 1-7, Jan. 2017.
- [4] P. Bevilacqua, M. Frego, E. Bertolazzi, D. Fontanelli, L. Palopoli, and F. Biral, “Path planning maximising human comfort for assistive robots,” Proc. of 2016 IEEE Conf. Control Appl., pp. 1421-1427, 2016.
- [5] Y. Suzuki, S. Thompson, and S. Kagami, “Smooth path planning with pedestrian avoidance for wheeled robots,” J. Robot. Mechatron., Vol.22, No.1, pp. 21-27, 2010.
- [6] S. Gulati, C. Jhurani, B. Kuipers, and R. Longoria, “A framework for planning comfortable and customizable motion of an assistive mobile robot,” Proc. of 2009 IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 4253-4260, 2009.
- [7] Y. Morales, N. Kallakuri, K. Shinozawa, T. Miyashita, and N. Hagita, “Human-comfortable navigation for an autonomous robotic wheelchair,” Proc. of 2013 IEEE/RSJ Int. Conf. Intell. Robots Syst., pp. 2737-2743, 2013.
- [8] Y. Morales, A. Watanabe, F. Ferreri, J. Even, K. Shinozawa, and N. Hagita, “Passenger discomfort map for autonomous navigation in a robotic wheelchair,” Rob. Auton. Syst., Vol.103, pp. 13-26, 2018.
- [9] A. Lopes, J. Rodrigues, J. Perdigao, G. Pires, and U. Nunes, “A new hybrid motion planner,” IEEE Robot. Autom. Mag., Vol.23, No.4, pp. 82-93, 2016.
- [10] H. Yoshitake, K. Nishi, and M. Shino, “Autonomous motion planning in pedestrian space considering passenger comfort,” J. Robot. Mechatron., Vol.32, No.3, pp. 580-587, 2020.
- [11] J. J. Park and B. Kuipers, “A smooth control law for graceful motion of differential wheeled mobile robots in 2D environment,” Proc. of 2011 IEEE Int. Conf. Robot. Autom., pp. 4896-4902, 2011.
- [12] S. Gulati and B. Kuipers, “High performance control for graceful motion of an intelligent wheelchair,” Proc. of 2008 IEEE Int. Conf. Robot. Autom., pp. 3932-3938, 2008.
- [13] Y. Morales, T. Miyashita, and N. Hagita, “Social robotic wheelchair centered on passenger and pedestrian comfort,” Rob. Auton. Syst., Vol.87, pp. 355-362, 2017.
- [14] T. Q. Pham, C. Nakagawa, A. Shintani, and T. Ito, “Evaluation of the effects of a personal mobility vehicle on multiple pedestrians using personal space,” IEEE Trans. Intell. Transp. Syst., Vol.16, No.4, pp. 2028-2037, 2015.
- [15] M. Elbanhawi, M. Simic, and R. Jazar, “In the passenger seat: Investigating ride comfort measures in autonomous cars,” IEEE Intell. Transp. Syst. Mag., Vol.7, No.3, pp. 4-17, 2015.
- [16] C. Liu, Y. Ooeda, and T. Sumi, “A model for pedestrian movement with obstacle vision using personal space concept,” J. Infrastruct. Plan. Manag. D, Vol.64, No.4, pp. 513-524, 2008 (in Japanese).
- [17] D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robot. Autom. Mag., Vol.4, No.1, pp. 23-33, 1997.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.