Development Report:
Disaster Rescue via Multi-Robot Collaboration: Development, Control, and Deployment
Yutaka Watanobe, Raihan Kabir, Ryuma Aoba, Ayato Ohashi, Shunsuke Ogata, Mizuki Shiga, Kota Tsuruno, Tsuyoshi Anazawa, and Keitaro Naruse
Department of Computer Science and Engineering, The University of Aizu
Tsuruga, Ikkimachi, Aizuwakamatsu, Fukushima 965-8580, Japan

Aging social infrastructure needs maintenance and inspection for which robot technology is highly effective. It is also effective for disaster rescue and recovery operations. Tunnel disaster rescue is risky for human workers. Robot technology can perform this work easily and accelerate rescue and recovery operations. This paper introduces a framework for the rescue robot development, control, and deployment steps. This framework also proposes automated and hybrid robot control systems in addition to conventional manual control. A multi-robot collaboration system causes the proposed control system to be convenient for deployment, reliable, and accelerate rescue work. In the development phase, controllers and different additional assistance tools for the robot have been developed in addition to the basic robot. As the proposed framework has been cultivated through our development and team collaboration training for the World Robot Summit (WRS) and the actual competition of the WRS, we will also present what we have achieved at the WRS.
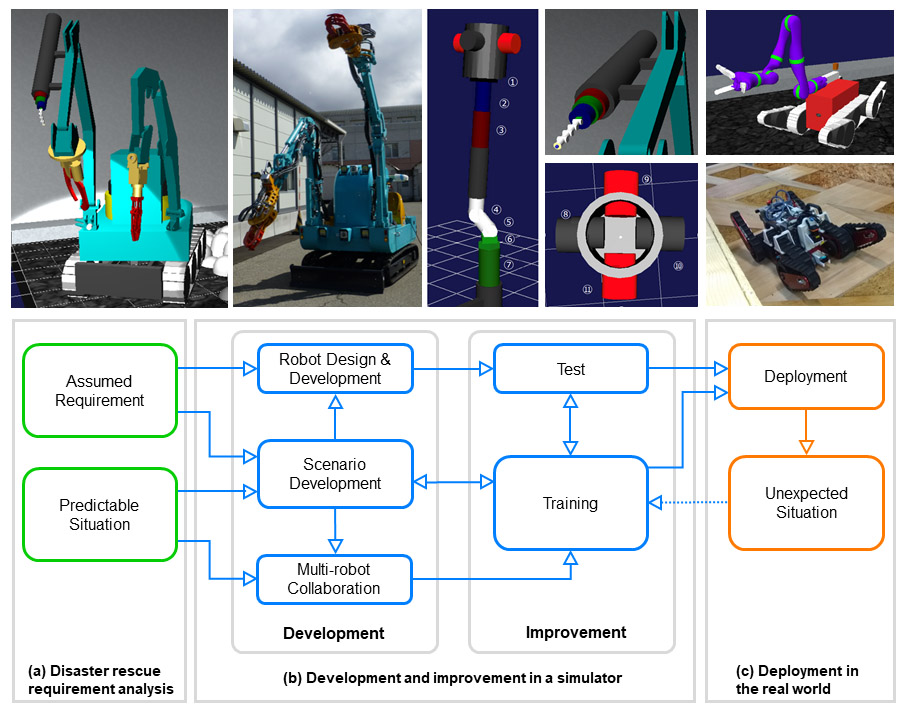
The framework for robot development, control, and deployment
- [1] M. Zorn, “Natural Disasters and Less Developed Countries,” Perspectives on Geographical Marginality, pp. 59-78, 2017. https://doi.org/10.1007/978-3-319-59002-8_4
- [2] M. Silberta and M. D. Usecheb, “Repeated Natural Disasters and Poverty in Island Nations: A. Decade of Evidence from Indonesia,” Corpus, Article No.550397, 2011.
- [3] A. Pratibha and A. Archna, “At The Whim Of Nature ‘Natural Disasters’: Causes And Prevention,” Int. J. of Research Granthaalayah, Vol.3, No.9SE, pp. 1-4, 2015. https://doi.org/10.29121/granthaalayah.v3.i9SE.2015.3194
- [4] B. Minjie, Q. Zheng, C. Cheng, and Y. Mei, “A review of research on robot technology for live work in distribution network,” SPIE 12257, 4th Int. Conf. on Information Science, Electrical, and Automation Engineering (ISEAE 2022), Article No.1225730, 2022. https://doi.org/10.1117/12.2640215
- [5] O. Yamashita, S. Suzuki, and T. Doi, “Special Issue on Creative Robot Contest for Decommissioning,” J. Robot. Mechatron., Vol.34, No.3, p. 497, 2022.
- [6] M. Okugawa et al., “Proposal of inspection and rescue tasks for tunnel disasters – Task development of Japan virtual robotics challenge,” 2015 IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), pp. 1-2, 2015. https://doi.org/10.1109/SSRR.2015.7443005
- [7] D. Shima, T. Furukawa, R. Aoba, A. Ohashi, K. Tsuruno, and K. Naruse, “Team Activity of Robot Competition of Simulated Robot in World Robot Summit 2020,” 2nd Int. Conf. on Educational Technology, Language & Technical Communication (ETLTC2021), Article No.04016, 2021.
- [8] K. Suzuki and K. Kawabata, “Development of a Robot Simulator for Decommissioning Tasks Utilizing Remotely Operated Robots,” J. Robot. Mechatron., Vol.32, No.6, pp. 1292-1300, 2020. https://doi.org/10.20965/jrm.2020.p1292
- [9] F. Kanehiro et al., “Simulator for Disaster Response Robotics,” S. Tadokoro (Ed.), “Disaster Robotics,” Springer Tracts in Advanced Robotics, Springer, Cham, Vol.128, 2019. https://doi.org/10.1007/978-3-030-05321-5_9
- [10] M. Kamezaki, J. Yang, H. Iwata, and S. Sugano, “A basic framework of virtual reality simulator for advancing disaster response work using teleoperated work machines,” J. Robot. Mechatron., Vol.26, No.4, pp. 486-495, 2014. https://doi.org/10.20965/jrm.2014.p0486
- [11] S. Shimizu, T. Kato, Y. Ocmula, and R. Suematu, “Wide angle vision sensor with fovea-navigation of mobile robot based on cooperation between central vision and peripheral vision,” IEEE RSJ/IEEE Int. Conf. on Intelligent Robots and Systems, Maui, HI, USA, Vol.2, pp. 764-771, October 29 to November 3, 2001. https://doi.org/10.1109/iros.2001.976261
- [12] R. Kabir, Y. Watanobe, K. Nakamura, M. R. Islam, and K. Naruse, “An Efficient Cloud Framework for Multi-Robot System Management,” SoMeT 2021, Vol.337, pp. 605-617, 2021.
- [13] R. Kabir, Y. Watanobe, M. R. Islam, K. Naruse, and M. M. Rahman, “Unknown Object Detection Using a One-Class Support Vector Machine for a Cloud-Robot System,” Sensors 2022, Vol.22, Article No.1352, 2022. https://doi.org/10.3390/s22041352
- [14] W. Chen, Y. Yaguchi, K. Naruse, Y. Watanobe, K. Nakamura, and J. Ogawa, “A Study of Robotic Cooperation in Cloud Robotics: Architecture and Challenges,” IEEE Access, Vol.6, pp. 36662-36682, 2018. https://doi.org/10.1109/ACCESS.2018.2852295
- [15] T. Kimura et al., “Competition task development for response robot innovation in World Robot Summit,” 2017 IEEE Int. Symp. on Safety, Security and Rescue Robotics (SSRR), pp. 129-130, 2017. https://doi.org/10.1109/SSRR.2017.8088151
- [16] S. Tadokoro, T. Kimura, M. Okugawa, K. Oogane, H. Igarashi, Y. Ohtsubo, N. Sato, M. Shimizu, S. Suzuki, T. Takahashi, S. Nakaoka, M. Murata, M. Takahashi, Y. Morita, and E. M. Rooney, “The World robot summit disaster robotics category – achievements of the 2018 preliminary competition,” Advanced Robotics, Vol.33, No.17, pp. 854-875, 2019. https://doi.org/10.1080/01691864.2019.1627244
- [17] Y. Ohtsubo and M. Matsuyama, “Group Control of Mobile Robots for More Efficient Searches – Verification of Semi-Autonomous Trajectory Tracking Motions in Irregular Ground Environment –,” J. Robot. Mechatron., Vol.30, No.6 pp. 980-990, 2018.
- [18] C. Trevai, N. Fujii, J. Ota, and T. Arai, “Multiple Mobile Robot Exploration and Patrol Strategy Using a Self-Organizing Planner Based on a Reaction-Diffusion Equation on a Graph,” J. Robot. Mechatron., Vol.20, No.1, pp. 24-37, 2008.
- [19] K. Nagatani, S. Kiribayashi, Y. Okada, K. Otake, K. Yoshida, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, M. Fukushima, and S. Kawatsuma, “Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots,” J. of Field Robotics, Vol.30, No.1, pp. 44-63, 2013. https://doi.org/10.1002/rob.21439
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.