Paper:
Development of Automatic Controlled Walking Assistive Device Based on Fatigue and Emotion Detection
Yunfan Li*, Yukai Gong*, Jyun-Rong Zhuang*, Junyan Yang*, Keisuke Osawa*, Kei Nakagawa**, Hee-hyol Lee*, Louis Yuge**, and Eiichiro Tanaka*
*Graduate School of Information, Production and Systems, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0135, Japan
**Hiroshima University
1-2-3 Kasumi, Minami-ku, Hiroshima 734-8551, Japan

The world’s aging population is increasing. The number of elderly individuals having walking impairments is also increasing. Adequate exercise is becoming necessary for them. Therefore, several walking assistive devices have been developed or are under development. However, elderly individuals may have low motivation for exercising, or they may experience physical damage by excessive fatigue. This study proposed a method to enable elderly individuals to exercise with a positive emotion and prevent damage such as muscle fatigue. We proposed a 3D human condition model to control the walking assistive device. It includes the arousal, pleasure, and fatigue dimensions. With regard to the arousal and pleasure dimensions, we used heartbeat and electromyography (EEG) signals to train a deep neural network (DNN) model to identify human emotions. For fatigue detection, we proposed a method based on near-infrared spectroscopy (NIRS) to detect muscle fatigue. All the sensors are portable. This implies that it can be used for outdoor activities. Then, we proposed a walking strategy based on a 3D human condition model to control the walking assistive device. Finally, we tested the effectiveness of the automatic control system. The wearing of the walking assistive device and implementation of the walking strategy can delay the fatigue time by approximately 24% and increase the walking distance by approximately 16%. In addition, we succeeded in visualizing the distribution of emotion during each walking method variation. It was verified that the walking strategy can improve the mental condition of a user to a certain extent. These results showed the effectiveness of the proposed system. It could help elderlies maintain higher levels of motivation and prevent muscle damage by walking exercise, using the walking assistive device.
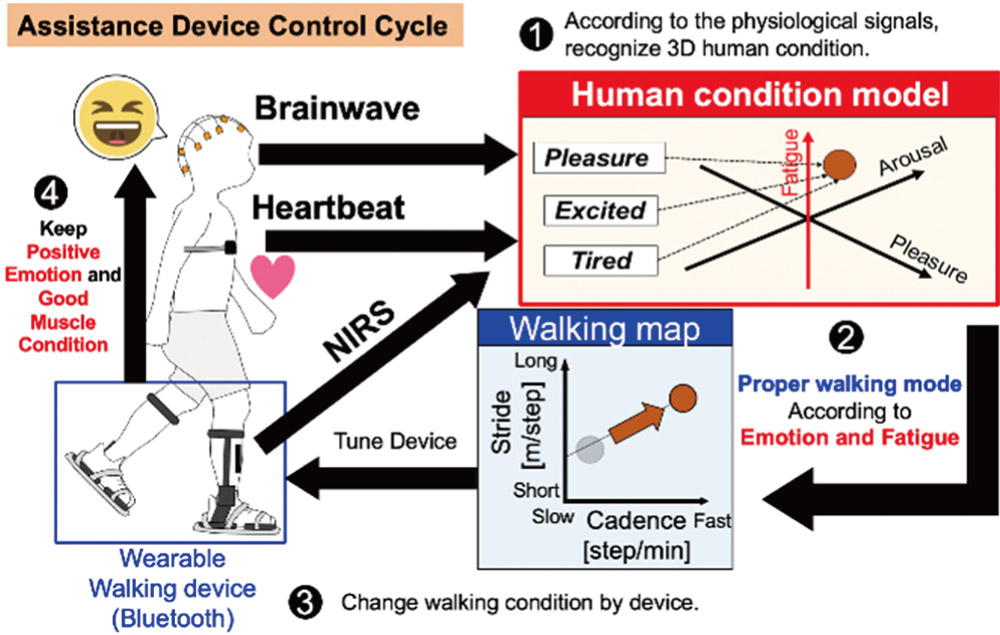
Walking assistive system based on emotion and fatigue detection
- [1] Y. Higashi, “Development and Dissemination of Nursing Robots and Support Systems for Welfare Sites,” J. Robot. Mechatron., Vol.33, No.4, pp. 713-718, 2021.
- [2] Y. Sankai, “HAL: Hybrid assistive limb based on cybernics,” Robotics Research, pp. 25-34, Springer, 2010.
- [3] C. Buesing et al., “Effects of a wearable exoskeleton stride management assist system (SMA) on spatiotemporal gait characteristics in individuals after stroke: a randomized controlled trial,” J. of Neuroengineering and Rehabilitation, Vol.12, No.1, pp. 1-14, 2015.
- [4] E. Tanaka, R. Niwa, K. Osawa, K. Nakajima, K. Muramatsu, K. Watanuki, S. Saegusa, and L. Yuge, “Motion assistance apparatus enabled for neuro-rehabilitation of patients and for the promotion of exercise for the elderly,” Proc. of IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM2015), pp. 937-942, 2015.
- [5] J. Y. Yang, J. R. Zhuang, G. Y. Wu, and E. Tanaka, “Study of Current Emotion and Muscle Fatigue Evaluation Method for a Walking Assistive Device,” 2020 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 1884-1889, 2020.
- [6] J. R. Zhuang, H. Nagayoshi, H. Kondo, K. Muramatsu, K. Watanuki, and E. Tanaka, “Development of a torque limiter for the gear of an assistive walking device,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.11, No.6, JAMDSM0089, 2017.
- [7] J. R. Zhuang, G. Y. Wu, H. H. Lee, and E. Tanaka, “Applying the Interaction of Walking-Emotion to an Assistive Device for Rehabilitation and Exercise,” 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 6489-6494, 2019.
- [8] J. Kawata J. Morimoto, Y. Kaji, M. Higuchi, K. Matsumoto, M. Booka, and S. Fujisawa, “Development of a Care Robot Based on Needs Survey,” J. Robot. Mechatron., Vol.33, No.4, pp. 739-746, 2021.
- [9] S. Jeong, H. Aoyama, S. Takahara, and Y. Takaoka, “Design of an Indoor Robotic Walking Care Device for Daily-Activity Activation of the Elderly,” J. Robot. Mechatron., Vol.33, No.4, pp. 900-910, 2021.
- [10] A. Higuchi, J. Shiraishi, Y. Kurita, and T. Shibata, “Effects of Gait Inducing Assist for Patients with Parkinson’s Disease on Double Support Phase During Gait,” J. Robot. Mechatron., Vol.32, No.4, pp. 798-811, 2020.
- [11] S. Ito, M. Ito, and M. Fukumi, “Human-Wants Detection Based on Electroencephalogram Analysis During Exposure to Music,” J. Robot. Mechatron., Vol.32, No.4, pp. 724-730, 2020.
- [12] E. P. Torres, E. A. Torres, M. Hernandez-Alvarez, and S. G. Yoo, “EEG-Based BCI Emotion Recognition: A Survey,” Sensors, Vol.20, No.18, Article No.5083, 2020.
- [13] M. Alimardani and K. Hiraki, “Passive Brain-Computer Interfaces for Enhanced Human-Robot Interaction,” Frontiers in Robotics and AI, Vol.7, Issue 125, 2020.
- [14] J. Inthiam, A. Mowshowitz, and E. Hayashi, “Mood Perception Model for Social Robot Based on Facial and Bodily Expression Using a Hidden Markov Model,” J. Robot. Mechatron., Vol.31, No.4, pp. 629-638, 2019.
- [15] R. M. Mehmood and H. J. Lee, “Emotion classification of EEG brain signal using SVM and KNN,” 2015 IEEE Int. Conf. on Multimedia & Expo Workshops (ICMEW), pp. 1-5, 2015.
- [16] K. Guo, H. Candra, H. Yu, H. Li, H. T. Nguyen, and S. W. Su, “EEG-based emotion classification using innovative features and combined SVM and HMM classifier,” 2017 39th Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society (EMBC), pp. 489-492, 2017.
- [17] R. Jenke, A. Peer, and M. Buss, “Feature extraction and selection for emotion recognition from EEG,” IEEE Trans. on Affective computing, Vol.5, No.3, pp. 327-339, 2014.
- [18] P. C. Petrantonakis and L. J. Hadjileontiadis, “Emotion recognition from EEG using higher order crossings,” IEEE Trans. on Information Technology in Biomedicine, Vol.14, No.2, pp. 186-197, 2009.
- [19] L. Auria and R. A. Moro, “Support vector machines (SVM) as a technique for solvency analysis,” DIW Discussion Papers No.811, 2008.
- [20] M. R. Al-Mulla, F. Sepulveda, M. Colley, and F. Al-Mulla, “Statistical class separation using sEMG features towards automated muscle fatigue detection and prediction,” 2009 2nd Int. Congress on Image and Signal Processing, pp. 1-5, 2009.
- [21] F. Bai, T. M. Lubecki, C. M. Chew, and C. L. Teo, “Novel time-frequency approach for muscle fatigue detection based on sEMG,” 2012 IEEE Biomedical Circuits and Systems Conf. (BioCAS), pp. 364-367, 2012.
- [22] B. Ma et al., “A PWM-based muscle fatigue detection and recovery system,” 2018 IEEE Int. Conf. on Bioinformatics and Biomedicine (BIBM), pp. 1013-1016, 2018.
- [23] J. Doud and J. Walsh, “Muscle fatigue and muscle length interaction: effect on the EMG frequency components,” Electromyography and Clinical Neurophysiology, Vol.35, No.6, pp. 331-339, 1995.
- [24] E. Tanaka, K. Muramatsu, Y. Osawa, S. Saegusa, L. Yuge, and K. Watanuki, “A Walking Promotion Method using the Tuning of a Beat Sound Based on a Two-Dimensional Emotion Map,” Advances in Intelligent Systems and Computing, Vol.483, pp. 519-525, 2017.
- [25] N. Picard and P. L. Strick, “Imaging the premotor areas,” Current Opinion in Neurobiology, Vol.11, No.6, pp. 663-672, 2001.
- [26] M. M. Bradley and P. J. Lang, “Measuring emotion: the self-assessment manikin and the semantic differential,” J. of Behavior Therapy and Experimental Psychiatry, Vol.25, Issue 1, pp. 49-59, 1994.
- [27] Y. Muramatsu and H. Kobayashi, “Assessment of local muscle fatigue by NIRS-development and evaluation of muscle suit,” Robomech J., Vol.1, No.1, Article No.19, 2014.
- [28] M. Jette, K. Sidney, and G. Blumchen, “Metabolic Equivalents (METS) in Exercise Testing, Exercise Prescription, and Evaluation of Functional Capacity,” Clinical Cardiology, Vol.13, Issue 8, pp. 555-565, 1990.
- [29] J. R. Zhuang, Y. J. Guan, H. Nagayoshi, K. Muramatsu, K. Watanuki, and E. Tanaka, “Real-time emotion recognition system with multiple physiological signals,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.13, No.4, JAMDSM0075, 2019.
- [30] N. Sekiya, H. Nagasaki, H. Ito, and T. Furuna, “Optimal walking in terms of variability in step length,” J. Orthop. Sports. Phys. Ther., Vol.26, No.5, pp. 266-272, 1997.
- [31] J. R. Zhuang, Y. J. Guan, H. Nagayoshi, L. Yuge, H. H. Lee, and E. Tanaka, “Two-Dimensional Emotion Evaluation with Multiple Physiological Signals,” Advances in Affective and Pleasurable Design, pp. 158-168, Springer Int. Publishing, 2019.
- [32] Y. Liu et al., “Implementation of SSVEP based BCI with Emotiv EPOC,” Proc. of 2012 IEEE Int. Conf. on Virtual Environments Human-Computer Interfaces and Measurement Systems (VECIMS), pp. 34-37, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.