Paper:
Development of a Three-Layer Fabric Mechanism for a Passive-Type Assistive Suit
Chi Lok Wan*, Toshifumi Ishioka**, Chiaki Kanda**, Keisuke Osawa*, Kenji Kodama**, and Eiichiro Tanaka***
*Graduate School of Information, Production and Systems, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0135, Japan
**Asahicho Corporation
110 Fukawa-cho, Fuchu-city, Hiroshima 726-0004, Japan
***Faculty of Science and Engineering, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0135, Japan

This paper proposes a three-layer elastic cloth fabric mechanism for an assistive suit with adjustable structure (based on a two-layer non-adjustable structure) to achieve different assistive force profiles. This increases the assistive force on the lower-back muscle group and alleviates the undesired pre-tension that acts on a user when the rubber belt located on the back is pulled to provide a higher assistive force. With the lower pre-tension, users would not encounter body fatigue as rapidly as in the past. The adjustable feature enables the structure to provide a force that increases gradually to a high level over a short distance without pre-tension. An experiment involving the measurement of muscle activities is conducted to evaluate the variation in assistive force in the lower back by comparing the three-layer suit to the two-layer non-adjustable suit. The experimental results show that the new three-layer structure successfully assists without pre-tension in the lower-back muscle group similar to the two-layer structure with pre-tension. A simple questionnaire is also administered to collect feedback from participants on the differences between the three-layer suit and two-layer suit in terms of wearing perception. Over half of the participants reported that the perception of pre-tension in the three-layer suit is lower than that in the two-layer suit.
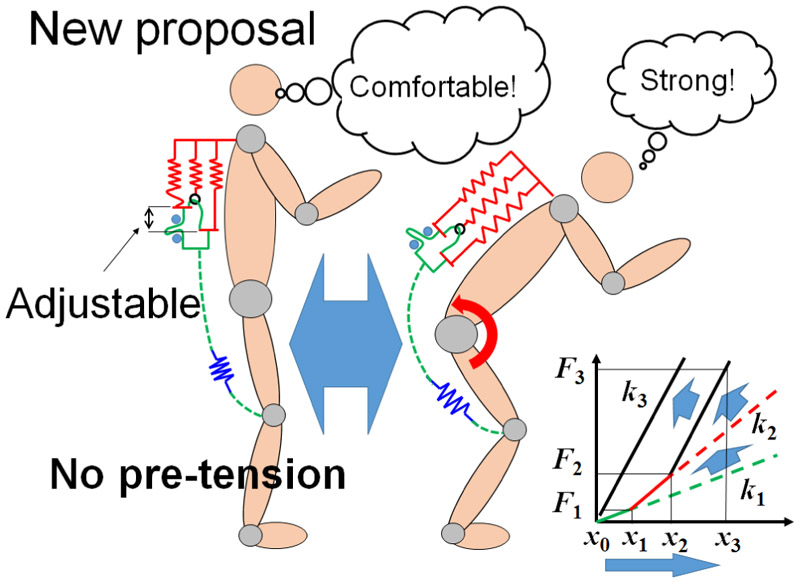
Three-layer structure adapted in an assistive suit
- [1] M. Suka and K. Yoshida, “Low back pain deprives the Japanese adult population of their quality of life: a questionnaire survey at five healthcare facilities in Japan,” Environment Health and Preventive Medicine, Vol.13, Issue 2, pp. 109-115, 2008.
- [2] Y.-L. Chen, “Changes in lifting dynamics after localized arm fatigue,” Int. J. of Industrial Ergonomics, Vol.25, pp. 611-619, 2000.
- [3] M. Ishii, K. Yamamoto, and K. Hyodo, “Stand-Alone Wearable Power Assist Suit – Development and Availability –,” J. Robot. Mechatron., Vol.17, No.5, pp. 575-583, 2005.
- [4] Y. Muramatsu, H. Kobayashi, Y. Sato, H. Jiaou, T. Hashimoto, and H. Kobayashi, “Quantitative Performance Analysis of Exoskeleton Augmenting Devices? Muscle Suit? for Manual Worker,” Int. J. Automation Technol., Vol.5, No.4, pp. 559-567, 2011.
- [5] K. Sano, E. Yagi, and M. Sato, “Development of a Wearable Assist Suit for Walking and Lifting-Up Motion Using Electric Motors,” J. Robot. Mechatron., Vol.25, No.6, pp. 923-930, 2013.
- [6] H. Kobayashi, T. Shiiba, and Y. Ishida, “Realization of All 7 Motions for the Upper Limb by a Muscle Suit,” J. Robot. Mechatron., Vol.16, No.5, pp. 504-512, 2004.
- [7] C. Thakur, K. Ogawa, and Y. Kurita, “Active Passive Nature of Assistive Wearable Gait Augment Suit for Enhanced Mobility,” J. Robot. Mechatron., Vol.30, No.5, pp. 717-728, 2018.
- [8] Y. Naruoka, N. Hiramitsu, and Y. Mitsuya, “A Study of PowerAssist Technology to Reduce Body Burden During Loading and Unloading Operations by Support of Knee Joint Motion,” J. Robot. Mechatron., Vol.28, No.6, pp. 949-957, 2016.
- [9] H. Suzuki, A. Sumoto, T. Kitajima, A. Kuwahara, and T. Yasuno, “Development and Control of Power-Assisted Lumbar Suit Based on Upper-Body Acceleration,” J. Robot. Mechatron., Vol.33, No.4, pp. 919-926, 2021.
- [10] D. Park and K.-J. Cho, “Development and evaluation of a soft wearable weight support device for reducing muscle fatigue on shoulder,” PLoS ONE, Vol.12, No.3, e0173730, doi: 10.1371/journal.pone.0173730, 2017.
- [11] Y. Imamura, T. Tanaka, Y. Suzuki, K. Takizawa, and M. Yamanaka, “Motion-based design of elastic belts for passive assistive device using musculoskeletal model,” 2011 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1343-1348, doi: 10.1109/ROBIO.2011.6181475, 2011.
- [12] H. Kobayashi, T. Matsushita, Y. Ishida, and K. Kikuchi, “New Robot Technology Concept Applicable to Human Physical Support – The Concept and Possibility of the Muscle Suit (Wearable Muscular Support Apparatus) –,” J. Robot. Mechatron., Vol.14, No.1, pp. 46-53, 2002.
- [13] H. Kobayashi, “Wearable Power Assist System “Muscle Suit”,” J. of The Japan Institute of Electronics Packaging, Vol.19, No.6, pp. 384-388, 2016.
- [14] E. Tanaka, K. Muramatsu, K. Watanuki, S. Saegusa,Y. Iwasaki, and L. Yuge, “Development of a Rubber Belt Suit for Lift-Up Motion to Assist both Upper Limb and Back and Evaluation of Muscle Activity,” J. of Japan Society for Design Engineering, Vol.52, No.6, pp. 405-418, 2017 (in Japanese).
- [15] Y. T. Liao, T. Ishioka, K. Mishima, C. Kanda, K, Kodama, and E. Tanaka, “Development and Evaluation of a Close-Fitting Assistive Suit for Back and Arm Muscle – e.z.UP® –,” J. Robot. Mechatron., Vol.32, No.1, pp. 157-172, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.