Paper:
Improvement of Haptic Interface for Teleoperation Endoscopic Surgery Simulators Using Magnetorheological Fluid Devices
Tetsumasa Takano*, Asaka Ikeda*, Isao Abe**, and Takehito Kikuchi**
*Graduate School of Engineering, Oita University
700 Dannoharu, Oita 870-1192, Japan
**Faculty of Science and Technology, Oita University
700 Dannoharu, Oita 870-1192, Japan

A magnetorheological (MR) fluid is a composite material comprising ferromagnetic particles, medium oils, and several types of additives. We developed an MR fluid clutch for haptics (H-MRC) and installed it in a haptic interface that simulates teleoperation endoscopic surgery (ES). To enhance its operability, we redesigned the H-MRC to reduce its weight and improve its control system. We reduced the weight of the H-MRC and haptic gripper by 77.0 g and 137.0 g, respectively. To evaluate the influence of the improvement and force feedback functions on remote operation skills, we conducted pick-and-place tests with a remotely controlled system. In the tests, we subjectively evaluated the NASA-TLX and quantitatively evaluated the success rate of the task. The results of the subjective assessment showed significant reductions in mental stress during the teleoperation task. In addition, the results of the quantitative evaluation showed that the force feedback function was effective against the teleoperation skills of the operators.
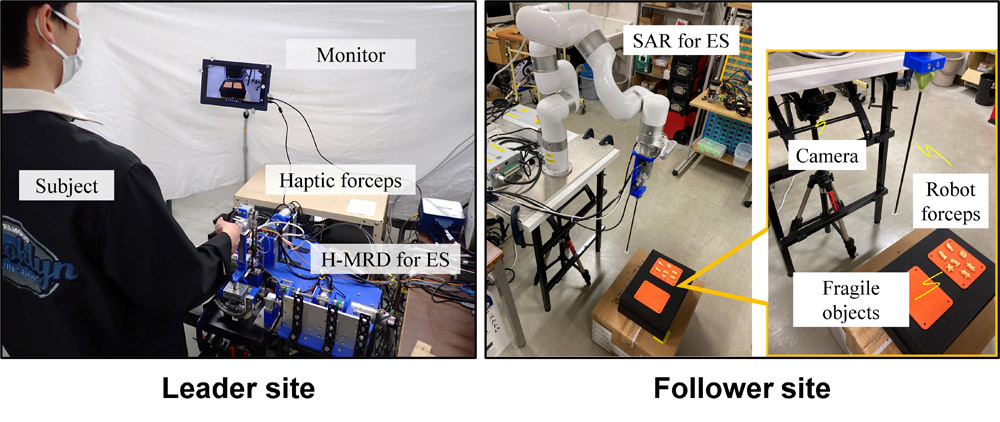
Leader-follower system
- [1] B. Siciliano and O. Khatib, “Springer Handbook of Robotics,” 2nd ed., Section 43, Telerobotics, pp. 1085-1108, Springer-Verlag, Berlin Heidelberg, 2016.
- [2] A. Schiele et al., “Haptics-1: Preliminary Results from the First Stiffness JND Identification Experiment in Space,” F. Bello, H. Kajimoto, and Y. Visell (Eds.), “Haptics: Perception, Devices, Control, and Applications,” EuroHaptics 2016, Lecture Notes in Computer Science, Vol.9774, Springer, Cham, doi: 10.1007/978-3-319-42321-0_2, 2016.
- [3] S. Tachi, N. Kawakami, H. Nii, K. Watanabe, and K. Minamizawa, “TELEsarPHONE: Mutual telexistence master-slave communication system based on retroreflective projection technology,” SICE J. of Control, Measurement, and System Integration, Vol.1, No.5, pp. 335-344, 2008.
- [4] P. Corke, “Robotics, vision and control,” 2nd ed., Springer, Berlin, pp. 6-7, 2017.
- [5] A. Simorov, R. S. Otte, C. Kopietz et al., “Review of surgical robotics user interface: What is the best way to control robotic surgery,” Surgical Endoscopy, Vol.26, pp. 2117-2125, 2012.
- [6] M. Tavakoli, A. Aziminejad, R. Patel, and M. Moallem, “High-fidelity bilateral teleoperation systems and the effect of multimodal haptics,” IEEE Trans. on Systems, Man, And Cybernetics – Part B: Cybernetics, Vol.37, No.6, pp. 1512-1528, 2007.
- [7] Japan Society for Endoscopic Surgery, “15th Nationwide Survey of Endoscopic Surgery in Japan,” p. 98, 2020.
- [8] W. B. Roberts, K. Tseng, P. C. Walsh, and M. Han, “Critical appraisal of management of rectal injury during radical prostatectomy,” Urology, Vol.76, pp. 1088-1091, 2017.
- [9] N. A. Soomro, D. A. Hashimoto, A. J. Porteous, C. J. A. Ridley, W. J. Marsh, R. Ditto, and S. Roy, “Systematic review of learning curves in robot-assisted surgery,” BJS Open, Vol.4, pp. 27-44, 2019.
- [10] S. N. F. Nahri, S. Du, and B. J. V. Wyk, “A review on haptic bilateral teleoperation systems,” J. of Intelligent & Robotic Systems, Vol.104, Article No.13, 2022.
- [11] P. Shi, S. Guo, L. Zhang, X. Jin, H. Hirata, T. Tamiya, and M. Kawanishi, “Design and evaluation of a haptic robot-assisted catheter operating system with collision protection function,” IEEE Sensors J., Vol.21, No.18, pp. 20807-20816, 2021.
- [12] X. Li, S. Guo, P. Shi, X. Jin, and M. Kawanishi, “An endovascular catheterization robotic system using collaborative operation with magnetically controlled haptic force feedback,” Micromachines, Vol.13, Article No.505, doi: 10.3390/mi13040505, 2022.
- [13] T. Wang, B. Pan, Y. Fu, S. Wang, and Y. Ai, “Design of a new haptic device and experiments in minimally invasive surgical robot,” Computer Assisted Surgery, Vol.22, No.sup1, pp. 240-250, doi: 10.1080/24699322.2017.1389402, 2017.
- [14] D. Stephan, H. Salzer, and F. Willeke, “First experiences with the new senhance telerobotic system in visceral surgery,” Visceral Medicine, Vol.34, pp. 31-36, 2018.
- [15] J. Holzer, P. Beyer, F. Schilcher, C. Poth, D. Stephan, C. Von Schnakenburg, W. Van Gemert, and L. Staib, “First pediatric pyeloplasty using the senhance® robotic system – A Case Report,” Children, Vol.9, Article No.302, 2022.
- [16] J. Carlson and M. Jolly, “MR fluid, foam, and elastomer devices,” Mechatronics, Vol.10, No.4, pp. 555-569, 2000.
- [17] T. Kikuchi, J. Noma, S. Akaiwa, and Y. Ueshima, “Response time of magnetorheological fluid-based haptic device,” J. Intell. Mater. Syst. Struct., Vol.27, pp. 859-865, 2015.
- [18] T. Kikuchi, K. Otsuki, J. Furusho, H. Abe, J. Noma, M. Naito, and N. Lauzier, “Development of compact MR fluid clutch for human-friendly actuator,” Adv. Robot., Vol.24, pp. 1489-1502, 2010.
- [19] T. Kikuchi and I. Abe, “Low inertia torque controllable device using magnetorheological fluid and umbrella-shaped rotor,” Engineering Research Express, Vol.1, No.2, Article No.02502, doi: 10.1088/2631-8695/ab4ecf, 2019.
- [20] P. Fauteux, M. Lauria, B. Heintz, and F. Michaud, “Dual-differential rheological actuator for high-performance physical robotics interaction,” IEEE Trans. on Robotics, Vol.26, No.4, pp. 607-618, 2010.
- [21] B.-K. Song, J.-S. Oh, and S.-B. Choi, “Design of new 4-DOF haptic master featuring magnetorheological fluid,” Advances in Mechanical Engineering, Article No.843498, 2014.
- [22] S. H. Choi, S. Kim, P. Kim, J. Park, and S. B. Choi, “A new visual feedback-based magnetorheological haptic master for ro-bot-assisted minimally invasive surgery,” Smart Mater. Struct., Vol.24, Article No.065015, 2015.
- [23] X. Yin, S. Guo, N. Xiao, T. Tamiya, H. Hirata, and H. Ishihara, “Safety operation consciousness realization of a MR fluids-based novel haptic interface for teleoperated catheter minimally invasive neuro surgery,” IEEE-ASME Trans. on Mechatronics, pp. 1083-4435, 2015.
- [24] T. Kikuchi, I. Abe, T. Nagata, A. Yamaguchi, and T. Takano, “Twin-driven actuator with multi-layered disc MR fluid clutches for haptics,” J. of Intelligent Material Systems and Structures, doi: 10.1177/1045389X20943958, 2020.
- [25] T. Kikuchi, T. Takano, A. Yamaguchi, A. Ikeda, and I. Abe, “Haptic interface with twin-driven MR fluid actuator for teleoperation endoscopic surgery system,” Actuator, Vol.10, No.245, 2021.
- [26] Z. Dua, Y. Lianga, Z. Yana, L. Suna, and W. Chenb, “Human-robot interaction control of a haptic master manipulator used in laparoscopic minimally invasive surgical robot system,” Mechanism and Machine Theory, Vol.156, Article No.104132, 2021.
- [27] J. A. Brragan, D. Chanci, D. Yu, and J. P. Wachs, “SACHETS: Semi-autonomous cognitive hybrid emergency teleoperated suction,” Proc. of the 30th IEEE Int. Conf. on Robot & Human Interactive Communication, pp. 1243-1248, August 8-12, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.