Review:
Micro-Robotic Medical Tools Employing SMA Actuators for Use in the Human Body
Yoichi Haga*1,*4, Takashi Mineta*2, Tadao Matsunaga*3, and Noriko Tsuruoka*4
*1Graduate School of Biomedical Engineering, Tohoku University
6-6-01 Aramaki Aza-Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan
*2Graduate School of Science and Engineering, Yamagata University
4-3-16 Jonan, Yonezawa, Yamagata 992-8510, Japan
*3Faculty of Engineering, Tottori University
4-101 Koyama, Minami, Tottori-shi, Tottori 680-8552, Japan
*4Graduate School of Engineering, Tohoku University
6-6-01 Aramaki Aza-Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan

Several micro-robotic medical tools, including catheters, guide wires, and endoscopes, employing shape memory alloy (SMA) actuators have been proposed and developed for use in the human body. This paper describes the basic principle of SMAs and the characteristics of several mechanisms, such as unidirectional bending, multi-directional bending, torsional movement, extension, and stiffness control. Moreover, some medical applications, such as insertion assistance and endoscopic and laser positioning, are described.
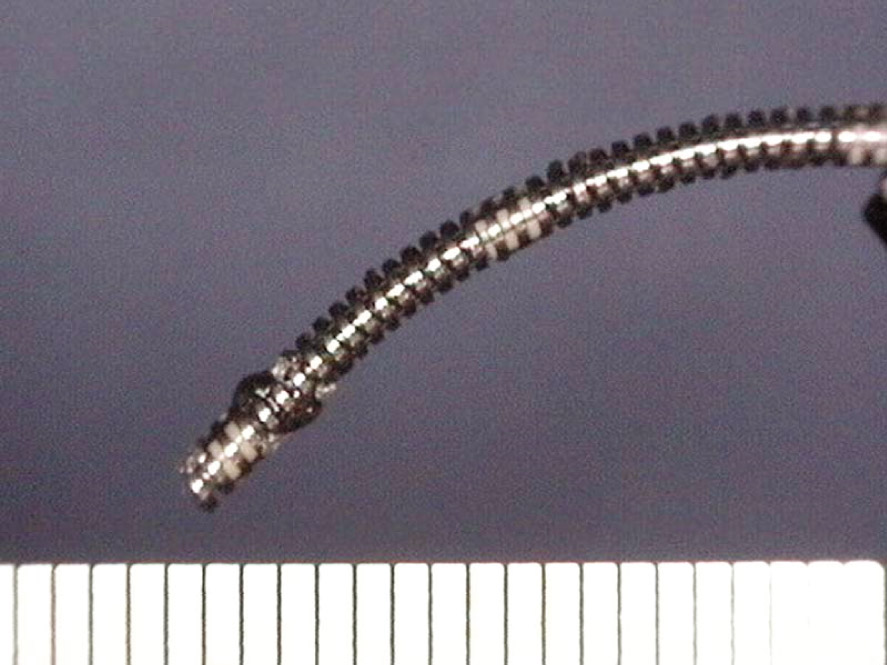
Multi-directional active bending catheter
- [1] P. Krulevitch, A. P. Lee, P. B. Ramsey. J. C. Trevino, J. Hamilton, and M. A. Northrup, “Thin film shape memory alloy microactuators,” J. Microelectromech. Syst., Vol.5, No.4, pp. 270-282, 1996.
- [2] K. Otsuka and C. M. Wayman, “Shape Memory Materials,” Cambridge University Press, 1998.
- [3] M. Kohl, “Shape Memory Microactuator,” Springer, 2004.
- [4] K. Kuribayashi, M. Yoshitake, and S. Ogawa, “Reversible SMA Actuator for Micron Sized Robot,” Proc. of the IEEE Micro Electro Mechanical Systems, pp. 217-221, 1990.
- [5] J. Szewczyk, E. Marchandise, P. Flaud, L. Royon, and R. Blanc, “Active Catheters for Neuroradiology,” J. Robot. Mechatron., Vol.23, No.1, pp. 105-115, 2011.
- [6] S. Kaneko, S. Aramaki, K. Arai, Y. Takahashi, H. Adachi, and K. Yanagisawa, “Multi-Freedom Tube Type Manipulator with SMA Plate,” Proc. of the Int. Symp. on Microsystems, Intelligent Materials and Robots, Vol.7, No.3, pp. 87-90, 1995.
- [7] T. Mineta, T. Mitsui, Y. Watanabe. S. Kobayashi. Y. Haga, and M. Esashi, “An active guide wire with shape memory alloy bending actuator fabricated by room temperature process,” Sens. Actuators A, Vol.97-98, pp. 632-637, 2002.
- [8] T. Mineta, T. Mitsui. Y. Watanabe, S. Kobayashi, Y. Haga, and M. Esashi, “Batch fabricated Flat meandering shape memory alloy actuator for active catheter,” Sens. Actuators A, Vol.88, No.2, pp. 112-120, 2001.
- [9] M. Mizushima, Y. Haga, K. Totsu, and M. Esashi, “Active Bending Long Intestinal Tube Using Shape Memory Alloy,” Proc. of the Asia-Pacific Conf. of Transducers and Micro-Nano Technology, pp. 893-896, 2004.
- [10] V. Sars, S. Haliyo, and J. Szewczyk, “A practical approach to the design and control of active endoscopes,” Mechatronics, Vol.20, No.2, pp. 251-264, 2009.
- [11] D. Reynaerts, J. Peirs, and H. V. Brussel, “Shape memory micro-actuation for a gastro-intestinal intervention system,” Sens. Actuators A, Vol.77, No.2, pp. 157-166, 1999.
- [12] P. W. Bremer, “U.S. Patent 4 753 223,” 1988.
- [13] T. Fukuda, S. Guo. K. Kosuge, F. Arai, M. Negoro, and K. Nakabayashi, “Micro Active Catheter System with Multi Degrees of Freedom,” Proc. IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2290-2295, 1994.
- [14] H. Takizawa, H. Tosaka, R. Ohta, S. Kaneko, and Y. Ueda, “Development of a Microfine Active Bending Catheter Equipped with MIF Tactile Sensors,” Proc. of the 12th IEEE Int. Conf. on Micro Electro Mechanical Systems, pp. 412-417, 1999.
- [15] G. Lim, K. Park, M. Sugihara, K. Minami, and M. Esashi, “Future of active catheters,” Sens. Actuators A, Vol.56, Nos.1-2, pp. 113-121, 1996.
- [16] Y. Haga, Y. Tanahashi, and M. Esashi, “Small diameter active catheter using shape memory alloy,” Proc. of the IEEE Int. Workshop on Micro Electro Mechanical Systems, pp. 419-424, 1998.
- [17] K. Ikuta, M. Tsukamoto, and S. Hirose, “Shape Memory Alloy Servo Actuator System with Electric Resistance Feedback and Application for Active Endoscope,” Proc. of the IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 427-430, 1988.
- [18] Y. Haga, S. Maeda, and M. Esashi, “Bending, torsional and extending active catheter assembled using electroplating,” Proc. of the IEEE Int. Micro Electro Mechanical Systems, pp. 181-186, 2000.
- [19] S. Ballandras, M. Calin, S. Zissi, A. Bertsch, J. C. Andre, and D. Hauden, “Microstereophotolithography and shape memory alloy for the fabrication of miniaturized actuators,” Sens. and Actuators A, Vol.62, Nos.1-3, pp. 741-747, 1997.
- [20] K. Park, K. Minami, and M. Esashi, “An integrated communication and control system for a multilink active catheter,” J. Micromech. Microeng., Vol.6, No.3, pp. 345-351, 1996.
- [21] Y. Haga and M. Esashi, “Assembly of Bending, Torsional and Extending Active Catheter Using Electroplating,” IEEJ Trans. on Sensors and Micromachines, Vol.120, No.11, pp. 515-520, 2000 (in Japanese).
- [22] D. Homma. S. Uemura, and F. Nakazawa, “Functional Anisotropic Shape Memory Alloy Fiber and Differential Servo Actuator,” Proc. of the Int. Conf. on Shape Memory and Superelastic Technologies, pp. 463-472, 2007.
- [23] T. Kobayashi, T. Matsunaga, and Y. Haga, “One Directional Active Bending Mechanism Using Shape Memory Alloy Wire for Minimally Invasive Medicine and Feedback Control by Changing in Electrical Resistance of Wire,” IEEJ Trans. on Sensors and Micromachines, Vol.135, No.10, pp. 393-398, 2015 (in Japanese).
- [24] W. Makishi, T. Matsunaga, M. Esashi, and Y. Haga, “Active Bending Electric Endoscope Using Shape Memory Alloy Coil Actuators,” IEEJ Trans. on Sensors and Micromachines, Vol.127, No.2, pp. 75-81, 2007 (in Japanese).
- [25] W. Makishi, M. Ikeda, M. Esashi, T. Matsunaga, and Y. Haga, “Development of Active Bending Endoscope Using Shape Memory Alloy for Disposable and Thin Endoscope,” IEEJ Trans. on Sensors and Micromachines, Vol.131, No.3, pp. 102-110, 2011 (in Japanese).
- [26] T. Tachioka, T. Matsunaga, Y. Tanahashi, N. Tsuruoka, and Y. Haga, “Position controlling mechanism of laser irradiation in flexible transurethral lithotripsy (f-TUL),” J. of Japan Society of Computer Aided Surgery, Vol.20, No.2, pp. 77-85, 2018 (in Japanese).
- [27] Y. Haga, T. Kobayashi, and T. Matsunaga, “Actuator Manufacturing Method, Actuator,” Japanese Patent 6754960, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.