Paper:
Development of Experimental Multi-Robot System for Network Connectivity Controls
Toki Hiasa and Toru Murayama
National Institute of Technology, Wakayama College
77 Noshima, Nada-cho, Gobo, Wakayama 644-0023, Japan

This paper reports some results of network connectivity control experiments using a multi-robot system which we developed. Although a lot of connectivity control algorithms for a multi-robot network are proposed, almost all of them are verified only on computer simulations or using experimental robots with centralized sensors and controllers. To execute experimental verifications of connectivity control algorithms on a distributed robotic system, we developed an experimental multi-robot system. Hardware installed on the robot and information flow from sensors to actuators are detailed. Some results of measurement experiments are shown to estimate accuracy to detect a neighbor position. Then, results of connectivity control experiments using the developed multi-robot system are discussed.
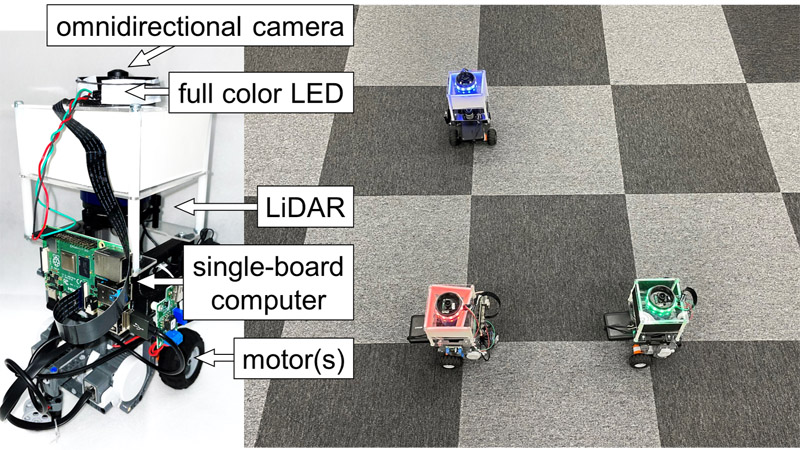
Developed robot and control experiment
- [1] J. Cortés and M. Egerstedt, “Coordinated control of multi-robot systems: a survey,” SICE J. of Control, Measurement, and System Integration, Vol.10, No.6, pp. 495-503, 2017.
- [2] M. Dorigo, G. Theraulaz, and V. Trianni, “Reflections on the future of swarm robotics,” Science Robotics, Vol.5, No.49, 2020.
- [3] L. Sabattini, C. Secchi, N. Chopra, and A. Gasparri, “Distributed control of multirobot systems with global connectivity maintenance,” IEEE Trans. on Robotics, Vol.29, No.5, pp. 1326-1332, 2013.
- [4] L. Siligardi et al., “Robust area coverage with connectivity maintenance,” Proc. of Int. conf. on Robotics and Automation (ICRA), pp. 2202-2208, 2019.
- [5] P. R. Giordano, A. Franchi, C. Secchi, and H. H. Bülthoff, “A passivity-based decentralized strategy for generalized connectivity maintenance,” Int. J. of Robotics Research, Vol.32, No.3, pp. 299-323, 2013.
- [6] Y. Ikemoto, K. Nishimura, Y. Mizutama, T. Sasaki, and M. Jindai, “Network connectivity control of mobile robots by fast position estimations and Laplacian kernel,” J. Robot. Mechatron., Vol.32, No.2, pp. 422-436, 2020.
- [7] M. Zavlanos and G. Pappas, “Distributed connectivity control of mobile networks,” IEEE Trans. on Robotics, Vol.24, No.6, pp. 1416-1428, 2008.
- [8] D. Dimarogonas and K. Kyriakopoulos, “Connectedness preserving distributed swarm aggregation for multiple kinematic robots,” IEEE Trans. on Robotics, Vol.24, No.5, pp. 1213-1223, 2008.
- [9] A. Gasparri, A. Leccese, L. Sabattini, and G. Ulivi, “Collective control objective and connectivity preservation for multi-robot systems with bounded input,” Proc. of 2014 American Control Conf., pp. 813-818, 2014.
- [10] H. Poonawala, A. C. Satici, H. Eckert, and M. W. Spong, “Collision-free formation control with decentralized connectivity preservation for nonholonomic-wheeled mobile robots,” IEEE Trans. on Control of Network Systems, Vol.2, No.2, pp. 122-130, 2015.
- [11] W. Huang, Y. Wang, and X. Yi, “Deep Q-Learning to Preserve Connectivity in Multi-robot Systems,” Proc. of the 9th Int. Conf. on Signal Processing Systems, pp. 45-50, 2017.
- [12] J. Scherer and B. Rinner, “Multi-robot persistent surveillance with connectivity constraints,” IEEE Access, Vol.8, pp. 15093-15109, 2020.
- [13] Y. Dong, “Rendezvous with connectivity preservation for multi-robot systems with an unknown leader,” Int. J. of Control, Vol.91, No.2, pp. 470-479, 2018.
- [14] M. Dorigo, “SWARM-BOT: an experiment in swarm robotics,” Proc. 2005 IEEE Swarm Intelligence Symp., pp. 192-200, 2005.
- [15] A. Konno, Y. Ohkubo, N. Ono, Y. Suzuki, and S. Ito, “Development and assessment of an experimental system for swarm formation by underwater robots, ” J. of Aero Aqua Bio-mechanisms, Vol.3, No.1, pp. 127-133, 2013.
- [16] J. Y. Kim, T. Colaco, Z. Kashino, G. Nejat, and B. Benhabib. “mROBerTO: A modular millirobot for swarm-behavior studies,” 2016 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2109-2114, 2016.
- [17] Y. Katada, A. Nishiguchi, K. Moriwaki, and R. Watakabe, “Swarm robotic network using Lévy flight in target detection problem,” Proc. on The First Int. Symp. on Swarm Behavior and Bio-Inspired Robotics, pp. 310-315, 2015.
- [18] S. Hoshino and K. Takahashi, “Dynamic Partitioning Strategies for Multi-Robot Patrolling Systems,” J. Robot. Mechatron., Vol.31, No.4, pp. 535-545, 2019.
- [19] T. Kida, Y. Sueoka, H. Shigeyoshi, Y. Tsunoda, Y. Sugimoto, and K. Osuka, “Verification of Acoustic-Wave-Oriented Simple State Estimation and Application to Swarm Navigation,” J. Robot. Mechatron., Vol.33, No.1, pp. 119-128, 2021.
- [20] S. Wilson et al., “The Robotarium: Globally impactful opportunities, challenges, and lessons learned in remote-access, distributed control of multirobot systems,” IEEE Control Systems Magazine, Vol.40, No.1, pp. 26-44, 2020.
- [21] M. Fiedler, “Algebraic connectivity of graphs,” Czechoslovak Mathematical J., Vol.23, No.2, pp. 298-305, 1973.
- [22] P. Yang et al., “A Decentralized estimation and control of graph connectivity in mobile sensor networks,” Proc. on 2008 American Control Conf., pp. 2678-2683, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.