Paper:
Development and Evaluation of Dorsiflexion Support Unit Using Elastomer Embedded Flexible Joint
Takehito Kikuchi*1, Toma Ono*2, Maki Nakahara*2, Isao Abe*1, Kenichiro Tanaka*3, Yasushi Matsumoto*4, and Naoki Chijiwa*5
*1Faculty of Science and Technology, Oita University
700 Dannoharu, Oita 870-1192, Japan
*2Graduate School of Engineering, Oita University
700 Dannoharu, Oita 870-1192, Japan
*3Faculty of Welfare and Health Sciences, Oita University
700 Dannoharu, Oita 870-1192, Japan
*4Oita Prefectural College of Arts and Culture
1-11 Uenogaoka Higashi, Oita 870-0833, Japan
*5Arizono Orthopedic Supplies Co., Ltd.
1-7-5 Higashida, Yahatahigashi-ku, Kitakyushu 805-8538, Japan

In our previous study, we developed a walking support shoe with an elastomer-embedded flexible joint (EEFJ) to assist the function of tibialis anterior (TA) in initial stances (IC) and swing phases (SW). However, its usability and supporting effect have not been sufficiently evaluated. Therefore, in this study, we developed a dorsiflexion support unit (DSU) using the EEFJs with consideration on the usability for frail persons. Their needs were investigated in hearings at community centers. With reference to their comments, we proposed a three-phased scenario in which pre- / post-activities were considered as important factors of its product design of the DSU. We designed the DSU for better usability in the pre- / post-activities. Its basic function and mechanical properties were also investigated in experiments. According to the mechanical tests, the supporting torque was around 10% of the activation of TA in IC. In addition, the results of gait tests show reductions of ankle rotations by 17% and 11% in IC and SW, respectively, without significant increases of TA activations.
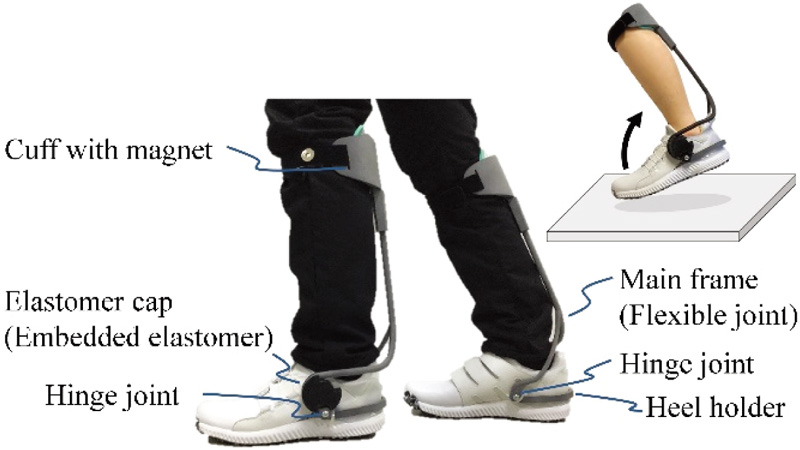
Basic structure of the DSU
- [1] X. Chen, G. Mao, and S. X. Leng, “Frailty syndrome: an overview,” Clinical Interventions in Aging, Vol.9, pp. 433-441, 2014.
- [2] L. P. Fried, C. Tangen, J. Walston et al., “Frailty in older adults: evidence for a phenotype,” J. Gerontol A Biol. Sci. Med. Sci., Vol.56, No.3, pp. M146-156, 2001.
- [3] M.-V. Castell, M. Sanchez, R. Julian, R. Queipo, S. Martin, and A. Otero, “Frailty prevalence and slow walking speed in persons age 65 and older: implications for primary care,” BMC Family Practice, Vol.14, Article No.86, doi: 10.1186/1471-2296-14-86, 2013.
- [4] V. Inman, H. Ralston, and F. Todd, “Human walking,” Williams & Wilkins, 1981.
- [5] J. Perry and J. Burnfield, “Gait Analysis: Normal and Pathological Function,” Second Edition, Slack Inc., 2010.
- [6] J. Lexell, C. C. Taylor, and M. Sjöström, “What is the cause of the ageing atrophy? Total number, size and proportion of different fiber types studied in whole vastus lateralis muscle from 15- to 83-year-old men,” J. Neurol. Sci., Vol.84, Nos.2-3, pp. 275-294, 1988.
- [7] T. Kikuchi, S. Tanida, T. Yasuda, and T. Fujikawa, “Automatic Adjustment of Initial Drop Speed of Foot for Intelligently Controllable Ankle Foot Orthosis,” Proc. of 2013 IEEE/SICE Int. Symp. on System Integration, pp. 276-281, 2013.
- [8] J. B. Redford, “Orthoses,” J. V. Basmajian and R. L. Kirby (Eds.), “Medical rehabilitation,” Williams & Wilkins, p. 101, 1984.
- [9] K. E. Gordon and D. P. Ferris, “Learning to walk with a robotic ankle exoskeleton,” J. of Biomechanics, Vol.40, pp. 2636-2644, 2007.
- [10] K. A. Shorter, G. F. Kogler, E. Loth, W. K. Durfee, and E. T. Hsiao-Wecksler, “A portable powered ankle foot orthosis for rehabilitation,” J. Rehabil. Res. Dev., Vol.48, No.4, pp. 459-472, 2011.
- [11] J.-C. Hong, H. Ohashi, and H. Iwata, “High-Dorsiflexion Assistive System for Passive Swing Phase Dorsiflexion Training and Preventing Compensatory Movements,” J. Robot. Mechatron., Vol.34, No.1, pp. 121-130, 2022.
- [12] B. M. Y. Nouri and Z. Zaidan, “Computer control of a powered two degree freedom reciprocating gait orthosis,” ISA Trans., Vol.45, No.2, pp. 249-258, 2006.
- [13] T. Ikehara, E. Tanaka, K. Nagamura, T. Tamiya, T. Ushida, K. Hashimoto, S. Kojima, K. Ikejo, and L. Yuge, “Development of Closed-Fitting-Type Walking Assistance Device for Legs with Self-Contained Control System,” J. Robot. Mechatron., Vol.22, No.3, pp. 380-390, 2010.
- [14] J. A. Blaya and H. Herr, “Adaptive Control of a Variable-Impedance Ankle-Foot Orthosis to Assist Drop-Foot Gait,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.12, No.1, pp. 24-31, 2004.
- [15] P. Yuan, G. Kawano, and H. Tsukagoshi, “Design and Modeling of Soft Pneumatic Helical Actuator with High Contraction Ratio,” J. Robot. Mechatron., Vol.32, No.5, pp. 1061-1070, 2020.
- [16] E. Tanaka, Y. Osawa, K. Muramatsu, K. Watanuki, S. Saegusa, and L. Yuge, “Study of RE-Gait® as the Device that Promotes Walking Using a Two-Dimensional Emotion Map,” ROMANSY 21 – Robot Design, Dynamics and Control: Proc. of the 21st CISM-IFToMM Symp., pp. 369-376, 2016.
- [17] T. Kikuchi, S. Tanida, K. Otsuki, T. Yasuda, and J. Furusho, “A Novel Estimating Method of the Gait State and Velocity Control in the Initial Stance Phase for the Intelligent Ankle Foot Orthosis with Compact MR Fluid Brake (i-AFO),” J. of the Japanese Society for Experimental Mechanics, Vol.10, No.Special, pp. s240-s246, 2010.
- [18] I. Abe, T. Kikuchi, R. Kai, and S. Tanida, “Ankle supporter with elastomer-embedded flexible joint,” Proc. of IEEE/SICE Int. Symp. on System Integration, pp. 126-131, 2016.
- [19] T. Kikuchi, K. Ishiya, I. Abe, S. Tanida, and T. Yasuda, “Novel Ankle Orthosis with Elastomer-Embedded Flexible Joint,” The 15th IEEE Conf. on Rehabilitation Robotics, pp. 1124-1129, 2017.
- [20] T. Kikuchi, T. Oshimoto, I. Abe, K. Tanaka, Y. Asaumi, and N. Chijiwa, “Development of Ankle Support Shoes with Elastomer-Embedded Flexible Joint,” J. Robot. Mechatron., Vol.32, No.5, pp. 1080-1087, 2020.
- [21] S. Yamamoto, A. Hagiwara, T. Mizobe, O. Yokoyama, and T. Yasui, “Development of an ankle-foot orthosis with an oil damper,” Prosthetics and Orthosics Int., Vol.29, No.3, pp. 209-219, 2005.
- [22] M. Alam, I. A. Choudhury, and A. B. Mamat, “Mechanism and Design Analysis of Articulated Ankle Foot Orthoses for Drop-Foot,” The Scientific World J., Vol.2014, pp. 867-869, 2014.
- [23] K. Desloovere, G. Molenaers, L. van Gestel, C. Huenaerts, A. Van Campenhout, B. Callewaert, P. van de Walle, and J. Seyler, “How can push-off be preserved during use of an ankle foot orthosis in children with hemiplegia? A prospective controlled study,” Gait & Porsure, Vol.24, No.2, pp. 142-151, 2006.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.