Paper:
Instantaneous Reaction and Vibration Suppression Using Two-Degree-of-Freedom Admittance Control with H∞ Feedback Controller in Surgical Training Simulator with Chiseling Operation
Kentaro Masuyama*, Yoshiyuki Noda**, Yasumi Ito**, Yoshiyuki Kagiyama**, and Koichiro Ueki***
*Integrated Graduate School of Medicine, Engineering, and Agricultural Sciences, University of Yamanashi
4-3-11 Takeda, Kofu, Yamanashi 400-8511, Japan
**Faculty of Engineering, University of Yamanashi
4-3-11 Takeda, Kofu, Yamanashi 400-8511, Japan
***Faculty of Medicine, University of Yamanashi
1110 Shimokato, Chuo, Yamanashi 409-3898, Japan

Surgical training simulators with virtual reality have been developed to enable surgeons to efficiently acquire and improve their surgical skills. In hard tissue surgery, the surgeon uses a chisel and mallet to cut a bone or tooth with large and instantaneous forces. In the previous study by present authors, to represent the force sensation of the cutting operation in the virtual training simulator, we constructed the force display device using the ball-screw mechanism to obtain high stiffness and display the large force. Additionally, we applied the two-degrees-of-freedom (2DOF) admittance control to react instantaneously to the impact force by pounding with the mallet. The feedback controller of the 2DOF admittance control is required to increase the high-frequency gain for improving the responsiveness of the force display device. However, the vibrational mode of the force display device can be excited by increasing the controller gain. Therefore, this study develops the design approach of the feedback controller using the H∞ control in the 2DOF admittance control system, which can be systematically constructed to reduce the vibrational mode and react instantaneously in the force display device. The efficacy of the proposed force display control system is verified through the virtual experience of the free movement and the hard contact operations.
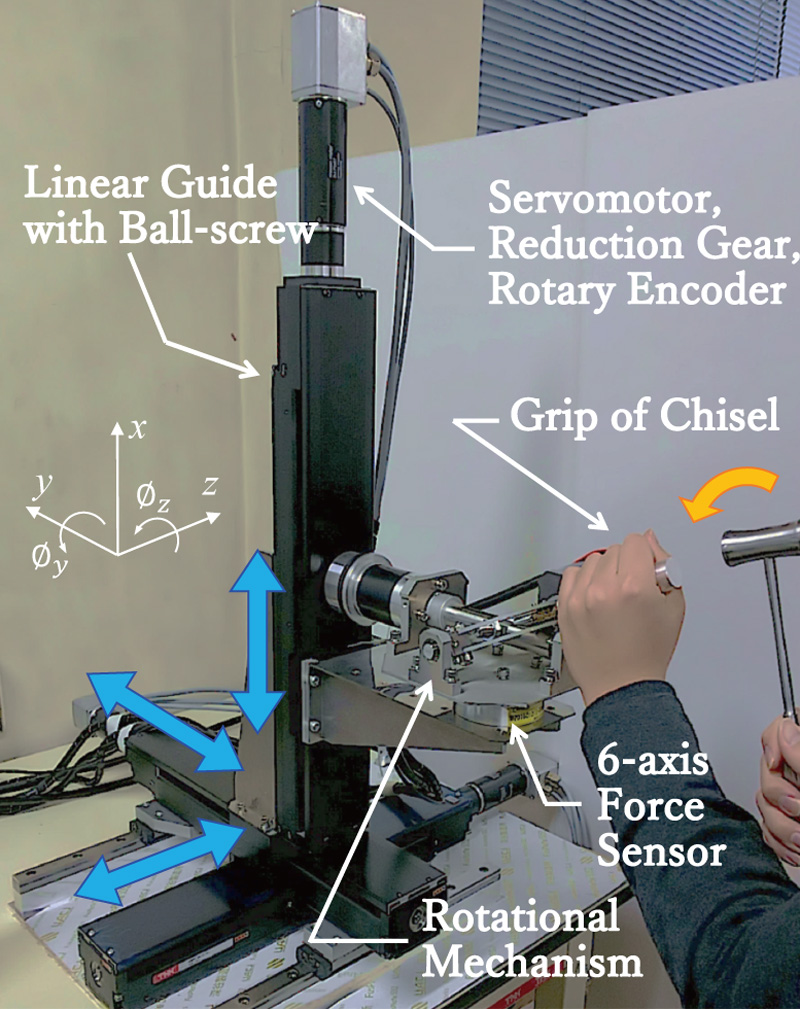
Force display device for surgical training simulator with chiseling operation
- [1] W. Shi, P. X. Liu, and M. Zheng, “Cutting procedures with improved visual effects and haptic interaction for surgical simulation systems,” Computer Methods and Programs in Biomedicine, Vol.184, Article No.105270, 2020.
- [2] D.-H. Kim, Y. Kim, J.-S. Park, and S.-W. Kim, “Virtual Reality Simulators for Endoscopic Sinus and Skull Base Surgery: The Present and Future,” Clinical and Experimental Otorhinolaryngology, Vol.12, No.1, pp. 12-17, 2019.
- [3] A. Bugdadi, R. Sawaya, K. Bajunaid et al., “Is Virtual Reality Surgical Performance Influenced by Force Feedback Device Utilized?,” J. of Surgical Education, Vol.76, No.1, pp. 262-273, 2018.
- [4] Y. Kim, H. Kim, and Y.-O. Kim, “Virtual reality and augmented reality in plastic surgery: A review,” Archives of Plastic Surgery, Vol.44, No.3, pp. 179-187, 2017.
- [5] D. Escobar-Castillejos, J. Noguez, L. Neri et al., “A Review of Simulators with Haptics Devices for Medical Training,” J. of Medical Systems, Vol.40, No.4, Article No.104, 2016.
- [6] Y. Tian, Y. Hu, and X. Shen, “A multi-GPU finite element computation and hybrid collision handling process framework for brain deformation simulation,” Computer Animation and Virtual Worlds, Vol.30, No.1, Article No.e1846, 2019.
- [7] G. Echegaray, I. Herrera, I. Aguinaga et al., “A Brain Surgery Simulator,” IEEE Computer Graphics and Applications, Vol.34, No.3, pp. 12-18, 2014.
- [8] T. Tokuyasu, K. Motodoi, Y. Endo et al., “Training System for Endoscopic Surgery Aiming to Provide the Sensation of Forceps Operation,” J. Robot. Mechatron., Vol.30, No.5, pp. 772-780, 2018.
- [9] C. K. Lam, K. Sundaraj, and M. N. Sulaiman, “Virtual reality simulator for phacoemulsification cataract surgery education and training,” Procedia Computer Science, Vol.18, pp. 742-748, 2013.
- [10] P. Wang, A. A. Becker, I. A. Jones et al., “Virtual reality simulation of surgery with haptic feedback based on the boundary element method,” Computers and Structures, Vol.85, Nos.7-8, pp. 331-339, 2007.
- [11] J. Maier, M. Weiherer, M. Huber, and C. Palm, “Imitating human soft tissue on basis of a dual-material 3D print using a support-filled metamaterial to provide bimanual haptic for a hand surgery training system,” Quantitative Imaging in Medicine and Surgery, Vol.9, No.1, pp. 30-42, 2019.
- [12] A. Neubauer, S. Wolfsberger, M.-T. Forster et al., “Advanced Virtual Endoscopic Pituitary Surgery,” IEEE Trans. on Visualization and Computer Graphics, Vol.11, No.5, pp. 497-507, 2005.
- [13] T. Miki, T. Iwai, K. Kotani, J. Dang et al., “Development of a virtual reality training system for endoscope-assisted submandibular gland removal,” J. of Cranio-Maxillofacial Surgery, Vol.44, No.11, pp. 1800-1805, 2016.
- [14] I. Kovler, L. Joskowicz, Y. A. Weil et al., “Haptic computer-assisted patient-specific preoperative planning for orthopedic fractures surgery,” Int. J. of Computer Assisted Radiology and Surgery, Vol.10, No.10, pp. 1535-1546, 2015.
- [15] Y. Kurita, A. Ikeda, K. Nagata, and T. Ogasawara, “Haptic Augmentation Utilizing the Reaction Force of a Base Object,” J. Robot. Mechatron., Vol.25, No.1, pp. 72-79, 2013.
- [16] M. Lacki and C. Rossa, “Design and Control of a 3 Degree-of-Freedom Parallel Passive Haptic Device,” IEEE Trans. on Haptics, Vol.13, No.4, pp. 720-732, 2020.
- [17] V. M. Hung, V. Mihai, C. Dragana et al., “Dynamic computation of haptic-robot devices for control of a surgical training system,” Int. J. of Computing, Vol.17, No.2, pp. 81-93, 2018.
- [18] M. Vulliez, S. Zeghloul, and O. Khatib, “Design strategy and issues of the Delthaptic, a new 6-DOF parallel haptic device,” Mechanism and Machine Theory, Vol.128, pp. 395-411, 2018.
- [19] S. Wijewickrema, B. Copson, X. Ma et al., “Development and validation of a virtual reality tutor to teach clinically oriented surgical anatomy of the ear,” IEEE 31st Int. Symp. on Computer-Based Medical Systems, pp. 12-17, 2018.
- [20] V. S. Arikatla, M. Tyagi, A. Enquobahrie et al., “High Fidelity Virtual Reality Orthognathic Surgery Simulator,” Medical Imaging 2018: Image-Guided Procedures, Robotic Interventions, and Modeling, Vol.10576, Article No.1057612, 2018.
- [21] X. Chen, P. Sun, and D. Liao, “A patient-specific haptic drilling simulator based on virtual reality for dental implant surgery,” Int. J. of Computer Assisted Radiology and Surgery, Vol.13, No.11, pp. 1861-1870, 2018.
- [22] P. Olsson, F. Nysjö, N. Singh et al., “Visuohaptic bone saw simulator: Combining vibrotactile and kinesthetic feedback,” Proc. of SIGGRAPH Asia 2015 Technical Briefs, Article No.10, 2015.
- [23] Y. Lin, X. Wang, F. Wu et al., “Development and validation of a surgical training simulator with haptic feedback for learning bone-sawing skill,” J. of Biomedical Informatics, Vol.48, pp. 122-129, 2014.
- [24] R. E. Sofronia, A. Davidescu, and G. G. Savii, “Towards a Virtual Reality Simulator for Orthognathic Basic Skills,” Applied Mechanics and Materials, Vol.162, pp. 352-357, 2012.
- [25] K. Masuyama, Y. Noda, Y. Ito, Y. Kagiyama, and K. Ueki, “Force Display Device and Control System for Surgical Training Simulator Using Bone Chisel,” Proc. of the 7th IEEE Int. Conf. on Biomedical Robotics and Biomechatronics, pp. 1248-1253, 2018.
- [26] K. Masuyama, Y. Noda, Y. Ito, Y. Kagiyama, and K. Ueki, “Force Display Control System Using 2 DOF Admittance Control in Surgical Training Simulator with Chiseling Operation,” Proc. of the 16th Int. Conf. on Informatics in Control, Automation and Robotics, Vol.1, pp. 767-774, 2019.
- [27] K. Masuyama, Y. Noda, Y. Ito, Y. Kagiyama, and K. Ueki, “Representation of chiseling operation using force display with two degree-of-freedom admittance control,” Trans. of the Society of Instrument and Control Engineers, Vol.56, No.6, pp. 333-344, 2020 (in Japanese).
- [28] K. Masuyama, Y. Noda, Y. Ito, Y. Kagiyama, and K. Ueki, “Force display control system for simultaneous 3-axis translational motion in surgical training simulator for chiseling operation,” ROBOMECH J., Vol.8, Article No.21, 2021.
- [29] K. Alam, A. V. Mitrofanov, and V. V. Silberschmidt, “Finite element analysis of forces of plane cutting of cortical bone,” Computational Materials Science, Vol.46, No.3, pp. 738-743, 2009.
- [30] Z. Liao and D. A. Axinte, “On chip formation mechanism in orthogonal cutting of bone,” Int. J. of Machine Tools & Manufacture, Vol.102, pp. 41-55, 2016.
- [31] J. Sui and N. Sugita, “Experimental Study of Thrust Force and Torque for Drilling Cortical Bone,” Annals of Biomedical Engineering, Vol.47, No.3, pp. 802-812, 2019.
- [32] J. Lee, B. A. Gozen, and O. B. Ozdoganlar, “Modeling and experimentation of bone drilling forces,” J. of Biomechanics, Vol.45, pp. 1076-1083, 2012.
- [33] C. G. Atkeson and J. M. Hollerbach, “Kinematic Features of Unrestrained Vertical Arm Movements,” J. of Neuroscience, Vol.5, No.9, pp. 2318-2330, 1985.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.