Paper:
Human-Gait-Based Tracking Control for Lower Limb Exoskeleton Robot
Yongping Dan†, Yifei Ge, Aihui Wang, and Zhuo Li
School of Electric and Information Engineering, Zhongyuan University of Technology
No. 41 Zhongyuan Road (M), Zhengzhou, Henan 450007, China
†Corresponding author

Research shows that it is practical for the normal human movement mechanism to assist the patients with stroke in robot-assisted gait rehabilitation. In passive training, the effect of rehabilitation training for patients can be improved by imitating normal human walking. To make the lower limb exoskeleton robot (LLER) move like a normal human, a tracking control scheme based on human gait data is proposed in this paper. The real human gait data is obtained from healthy subjects using a three-dimensional motion capture platform (3DMCP). Furthermore, the normal human motion characteristics are adopted to enhance the scientificity and effectiveness of assistant rehabilitation training using LLER. An adaptive radial basis function network (ARBFN) controller based on feed-forward control is presented to improve the trajectory tracking accuracy and tracking performance of the control system, where the ARBFN controller is deployed to predict the uncertain model parameters. The feed-forward controller based on the tracking errors is used to compensate for the input torque of LLER. The effectiveness of the presented control scheme is confirmed by simulation results based on experimental data.
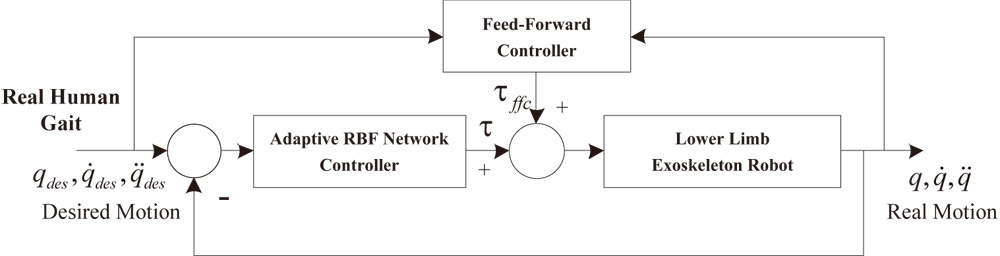
Control system
- [1] N. Norouzi-Gheidari, P. S. Archambault, and J. Fung, “Robot-Assisted Reaching Performance of Chronic Stroke and Healthy Individuals in a Virtual Versus a Physical Environment: A Pilot Study,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.27, No.6, pp. 1273-1281, 2019.
- [2] D. S. Nichols-Larsen, P. C. Clark, A. Zeringue et al., “Factors Influencing Stroke Survivors’ Quality of Life During Subacute Recovery,” Stroke, Vol.36, No.7, pp. 1480-1484, 2005.
- [3] H. Wang, “The Reorganization of Resting-State Brain Networks Associated with Motor Imagery Training in Chronic Stroke Patients,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.27, No.10, pp. 2237-2245, 2019.
- [4] F. O. Otite, N. Liaw, P. Khandelwal et al., “Increasing prevalence of vascular risk factors in patients with stroke: A call to action,” Neurology, Vol.89, No.19, pp. 1985-1994, 2017.
- [5] S. A. Murray, K. H. Ha, C. Hartigan et al., “An Assistive Control Approach for a Lower-Limb Exoskeleton to Facilitate Recovery of Walking Following Stroke,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.23, No.3, pp. 441-449, 2015.
- [6] S. Hussain, P. K. Jamwal, M. H. Ghayesh et al., “Assist-As-Needed Control of an Intrinsically Compliant Robotic Gait Training Orthosis,” IEEE Trans. on Industrial Electronics, Vol.64, Issue 2, pp. 1675-1685, 2017.
- [7] S. K. Agrawal, S. K. Banala, A. Fattah et al., “Assessment of Motion of a Swing Leg and Gait Rehabilitation with a Gravity Balancing Exoskeleton,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.15, No.3, pp. 410-420, 2007.
- [8] S. Kimura, R. Suzuki, K. Machida et al., “Proposal of Motion Judgment Algorithm Based on Joint Angle of Variable Elastic Assist Suit with High Back Drivability,” J. Robot. Mechatron., Vol.32, No.5, pp. 863-875, 2020.
- [9] M. Letswaart, M. Johnston, H. C. Dijkerman et al., “Mental practice with motor imagery in stroke recovery: randomized controlled trial of efficacy,” Brain, Vol.134, No.5, pp. 1373-1386, 2011.
- [10] W. Meng, Q. Liu, Z. Zhou et al., “Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation,” Mechatronics, Vol.31, pp. 132-145, 2015.
- [11] H. Gao, X. Song, L. Ding et al., “Adaptive motion control of wheeled mobile robot with unknown slippage,” Int. J. of Control, Vol.87, Issue 8, pp. 1513-1522, 2014.
- [12] S. Chen, Z. Chen, B. Yao et al., “Adaptive Robust Cascade Force Control of 1-DOF Hydraulic Exoskeleton for Human Performance Augmentation,” IEEE/ASME Trans. on Mechatronics, Vol.22, Issue 2, pp. 589-600, 2017.
- [13] W. Yu and J. Rosen, “Neural PID Control of Robot Manipulators with Application to an Upper Limb Exoskeleton,” IEEE Trans. on Cybernetics, Vol.43, Issue 2, pp. 673-684, 2013.
- [14] M. J. Kim and W. K. Chung, “Disturbance-Observer-Based PD Control of Flexible Joint Robots for Asymptotic Convergence,” IEEE Trans. on Robotics, Vol.31, Issue 6, pp. 1508-1516, 2015.
- [15] A. Wang, N. Hu, J. Yu et al., “Human-Like Robust Adaptive PD Based Human Gait Tracking for Exoskeleton Robot,” J. Robot. Mechatron., Vol.33, No.1, pp. 88-96, 2021.
- [16] A. Ferrara and G. P. Incremona, “Design of an Integral Suboptimal Second-Order Sliding Mode Controller for the Robust Motion Control of Robot Manipulators,” IEEE Trans. on Control Systems Technology, Vol.23, No.6, pp. 2316-2325, 2015.
- [17] A. Wang and M. Deng, “Human Arm-Like Robot Control Based on Human Multi-Joint Arm Viscoelastic Properties and a Modified Forward Gaze Model,” J. of System Design and Dynamics, Vol.6, Issue 2, pp. 170-185, 2012.
- [18] L. Wang, T. Chai, and C. Yang, “Neural-Network-Based Contouring Control for Robotic Manipulators in Operational Space,” IEEE Trans. on Control Systems Technology, Vol.20, No.4, pp. 1073-1080, 2012.
- [19] Z. Li, C. Su, L. Wang et al., “Nonlinear Disturbance Observer-Based Control Design for a Robotic Exoskeleton Incorporating Fuzzy Approximation,” IEEE Trans. on Industrial Electronics, Vol.62, Issue 9, pp. 5763-5775, 2015.
- [20] W. Chen, S. S. Ge, J. Wu et al., “Globally Stable Adaptive Backstepping Neural Network Control for Uncertain Strict-Feedback Systems with Tracking Accuracy Known a Priori,” IEEE Trans. on Neural Networks and Learning Systems, Vol.26, No.9, pp. 1842-1854, 2015.
- [21] C. Gan, C. Ding, and S. Yang, “Dynamical analysis and performance evaluation of a biped robot under multi-source random disturbances,” Acta Mechanica Sinica, Vol.30, pp. 983-994, 2014.
- [22] Z. Sun, F. Li, G. Wang et al., “A Novel RBF Neural Network-Based Iterative Learning Control for Lower Limb Rehabilitation Robot with Strong Robustness,” 2019 Chinese Control Conf. (CCC), pp. 4454-4459, 2019.
- [23] A. Bilesan, S. Komizunai, T. Tsujita et al., “Improved 3D Human Motion Capture Using Kinect Skeleton and Depth Sensor,” J. Robot. Mechatron., Vol.33, No.6, pp. 1408-1422, 2021.
- [24] J. Park and I. W. Sandberg, “Universal Approximation Using Radial-Basis-Function Networks,” Neural Computation, Vol.3, No.2, pp. 246-257, 1991.
- [25] A. Tözeren, “Human Body Dynamics,” Springer, 2000.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.