Paper:
Planning the Shortest Carrying Trajectory Including Path and Attitude Change Considering Gripping Constraints
Takahiro Ario and Ikuo Mizuuchi
Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei-shi, Tokyo 184-8588, Japan

Carrying gripped objects at high speed can lead to gripping failure owing to loads applied to the gripper by its acceleration. When carrying an object at high speed, it is important to carry it with accelerations at which gripping is maintained. Previously proposed methods generated the shortest carrying trajectory for a predetermined trajectory path. In this study, focusing on the object-carrying trajectory and the hand attitude of the gripper, we propose a method to generate the shortest carrying trajectory by varying the state quantities. The proposed method considers the gripping force and the deformation of the gripper. During planning, we estimated the deformation volume of the gripper from its inputs and generated the shortest carrying trajectory with the allowable force and deformation values as constraints. Using the proposed method, we generated a trajectory capable of carrying objects in a shorter time (0.28 times) than in a straight-line trajectory and conducted experiments with a robot arm. The trajectory was generated while keeping the hand attitude unchanged. Through experiments, we have proved the effectiveness of keeping objects gripped on the generated shortest carrying trajectory. Compared with a success ratio of 0.47 in keeping objects gripped on the trajectory with the same time as the generated trajectory, the success ratio on the generated trajectory is as high as 1.0.
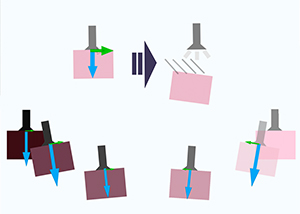
Short carrying trajectory to prevent grip failure
- [1] K. Tai, A.-R. El-Sayed, M. Shahriari, M. Biglarbegian, and S. Mahmud, “State of the art robotic grippers and applications,” Robotics, Vol.5, No.2, 11, 2016.
- [2] G. Mantriota, “Theoretical model of the grasp with vacuum gripper,” Mechanism and Machine Theory, Vol.42, No.1, pp. 2-17, 2007.
- [3] X. Li and T. Kagawa, “Theoretical and experimental study of factors affecting the suction force of a Bernoulli gripper,” J. of Engineering Mechanics, Vol.140, No.9, 2014.
- [4] X. Li, N. Li, G. Tao, H. Liu, and T. Kagawa, “Experimental comparison of Bernoulli gripper and vortex gripper,” Int. J. of Precision Engineering and Manufacturing, Vol.16, No.10, pp. 2081-2090, 2015.
- [5] J. Mahler, M. Matl, X. Liu, A. Li, D. Gealy, and K. Goldberg, “Dex-Net 3.0: Computing robust vacuum suction grasp targets in point clouds using a new analytic model and deep learning,” IEEE Int. Conf. on Robotics and Automation, pp. 5620-5627, 2018.
- [6] H. Dai, A. Majumdar, and R. Tedrake, “Synthesis and optimization of force closure grasps via sequential semidefinite programming,” A. Bicchi and W. Burgard (Eds.), “Robotics Research,” Vol.1, pp. 285-305, Springer, 2018.
- [7] R. Krug, Y. Bekiroglu, and M.-A. Roa, “Grasp quality evaluation done right: How assumed contact force bounds affect wrench-based quality metrics,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1595-1600, 2017.
- [8] H. Pham and Q.-C. Pham, “Critically fast pick-and-place with suction cups,” Int. Conf. on Robotics and Automation (ICRA), pp. 3045-3051, 2019.
- [9] J.-E. Bobrow, S. Dubowsky, and J.-S. Gibson, “Time-optimal control of robotic manipulators along specified paths,” The Int. J. of Robotics Research, Vol.4, No.3, pp. 3-17, 1985.
- [10] T.-S. Chung and C.-J. Wu, “A quasi minimum-time path following of a manipulator under dynamics constraints,” J. of KIEE, Vol.8, No.1, pp. 56-66, 1995.
- [11] F.-G. Flores and A. Kecskeméthy, “Time-optimal path planning for the general waiter motion problem,” V. Kumar, J. Schmiedeler, S.-V. Sreenivasan, and H.-J. Su (Eds.), “Advances in Mechanisms, Robotics and Design Education and Research,” pp. 189-203, Springer, 2013.
- [12] H. Pham and Q.-C. Pham, “A new approach to time-optimal path parameterization based on reachability analysis,” IEEE Trans. on Robotics, Vol.34, No.3, pp. 645-659, 2018.
- [13] V. Savkiv, R. Mykhailyshyn, O. Fendo, and M. Mykhailyshyn, “Orientation modeling of Bernoulli gripper device with off-centered masses of the manipulating object,” Procedia Engineering, Vol.187, pp. 264-271, 2017.
- [14] V. Savkiv, R. Mykhailyshyn, F. Duchon, and M. Mikhalishin, “Energy efficiency analysis of the manipulation process by the industrial objects with the use of Bernoulli gripping devices,” J. of Electrical Engineering, Vol.68, No.6, pp. 496-502, 2017.
- [15] V. Savkiv, R. Mykhailyshyn, F. Duchon, and M. Mikhalishin, “Modeling of Bernoulli gripping device orientation when manipulating objects along the arc,” Int. J. of Advanced Robotic Systems, Vol.15, No.2, 2018.
- [16] Y. Mutsuura et al., “Quasi-minimum time trajectory planning method of robot arm with electromagnetic attraction hand using genetic algorithm and experiments,” Int. J. Automation Technol., Vol.3, No.1, pp. 99-106, 2009.
- [17] S.-J. Chen, H. Worn, U.-E. Zimmermann, and R. Bischoff, “Gentle robotic handling - adaptation of gripperorientation to minimize undesired shear forces,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 309-314, 2006.
- [18] S.-J. Chen, B. Hein, and H. Worn, “Using acceleration compensation to reduce liquid surface oscillation during a high speed transfer,” IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2951-2956, 2007.
- [19] S.-J. Chen, B. Hein, and H. Worn, “Swing attenuation of suspended objects transported by robot manipulator using acceleration compensation,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2919-2924, 2007.
- [20] G. Cybenko, “Approximation by superpositions of a sigmoidal function,” Mathematics of Control, Signals, and Systems, Vol.2, No.4, pp. 303-314, 1989.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.