Paper:
Electric Field Strength Simulation Using 2D-Environment Map Generated by Tele-Operated Mobile Robot
SungHee Kim, Yasushi Hada, and Koji Kanayama
Department of Mechanical Systems Engineering, Kogakuin University
1-24-2 Nishi-Shinjuku, Shinjuku-ku, Tokyo 163-8677, Japan

In this study, we demonstrate the avoidance of the “lost robot” situation when wireless communication is interrupted. In our proposed method, the mobile robot measures the unknown environmental shape using a laser range finder. The sensor data and additional information (thickness and material characteristics) of the real environment are combined into the line segment map. We found that the electric field strength can be simulated using the line segment map. Experimental results verify the effectiveness of our proposed method.
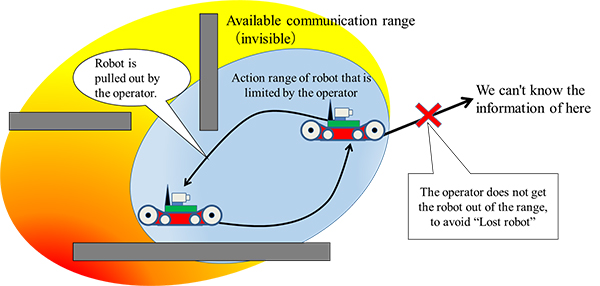
Causes of a “lost robots” when operating a tele-communication robot
- [1] T. Matsuda et al., “Electromagnetic field simulation to prevent disconnection of wireless communication for tele-operated mobile robot,” JSME Conf. on Robotics and Mechatronics, Article No.1P1-P17, 2013 (in Japanese).
- [2] S. Tadokoro, “Middle-long term issues of disaster robots in Japan,” J. of the Robotics Society of Japan, Vol.2, pp. 154-161, 2014 (in Japanese).
- [3] “TEPCO is still under consideration treatment of Quince that it stopped in reactor building,” Nikkan Kogyo News Robonable, October 28, 2011.
- [4] “Because robot of Topy Industries that it investigated nuclear accident cannot communicate by wireless, rescue is difficult,” Nikkan Kogyo News Robonable, July 13, 2012.
- [5] “Fukushima Daiichi Nuclear Reactor Investigation Robot Stops, Recovery Unlikely,” The Nikkei, April 10, 2015.
- [6] T. Matsuda et al., “Consideration and estimate of electric field strength simulation using partial map by mobile robot to prevent the distress of mobile robot,” 15th SICE System Integration Division Annual Conf., 3J1-3, 2014.
- [7] T. Uno, “Finite Difference Time Domain Method for Electromagnetic Field and Antennas,” Corona Publishing Co., Ltd., 1998.
- [8] S. Kim et al., “Improving precision to generate the environment shape of dynamic radio wave estimate,” 16th SICE System Integration Division Annual Conf., 3J1-4, 2014.
- [9] E. Mihankhah et al., “Line matching localization and map building with least square,” 2009 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 1734-1739, 2009.
- [10] K. Kanayama et al., “Evaluation of electric field strength simulation using the shape sensor to prevent distress of robot,” 16th SICE System Integration Division Annual Conf., 3E1-5, 2015 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.