Review:
Development of Robot Simulating Fuel Debris Retrieval
Shigekazu Suzuki, Hiroha Toba, Takumi Takeda, Yuta Togashi, and Takahiro Akao
National Institute of Technology, Fukushima College
30 Nagao, Kamiarakawa, Taira, Iwaki, Fukushima 970-8034, Japan

A creative robot contest for decommissioning was held as part of human resources development for decommissioning of the Fukushima Daiichi Nuclear Power Station of Tokyo Electric Power Co., Inc. In the 5th creative robot contest for decommissioning, robots were developed for fuel-debris retrieval from the lower part of the pedestal. Fukushima KOSEN developed a robot consisting of a primary robot that moves to an access port on the platform while a secondary robot is stored inside the main body. The robot collects fuel debris by lowering the secondary robot 3.2 m downward. Fukushima KOSEN also developed a graphical user interface (GUI) to visually express the motion of the robot.
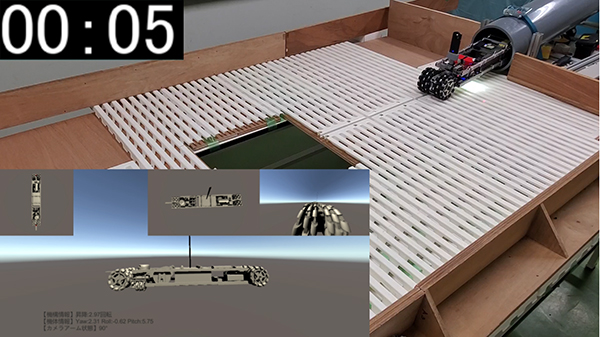
Motion of developed robot onto platform
- [1] S. Suzuki, “Human Resource Development Through the Creative Robot Contest for Decommissioning,” J. of the Robotics Society of Japan, Vol.36, No.7, pp. 483-486, 2018.
- [2] S. Suzuki, K. Aoyagi, and M. Harada, “R&D and Human Resource Development for Decommissioning of Fukushima Daiichi Nuclear Power Station: An Approach in NIT, Fukushima College,” J. of Plasma and Fusion Research, Vol.97, No.6, pp. 329-333, 2021.
- [3] S. Kawatsuma and H. Asama, “Radiation Tolerance and Management Method of Robots and Unmanned Heavy Construction Machines Using Semiconductors on the Shelf,” J. of the Robotics Society of Japan, Vol.34, No.8, pp. 552-557, 2016.
- [4] S. Sato, T. Song, and Y. Aiyama, “Development of Tele-Operated Underfloor Mobile Manipulator,” J. Robot. Mechatron., Vol.33, No.6, pp. 1398-1407, 2021.
- [5] K. Suzuki and K. Kawabata, “Development of a Robot Simulator for Decommissioning Tasks Utilizing Remotely Operated Robots,” J. Robot. Mechatron., Vol.32, No.6, pp. 1292-1300, 2020.
- [6] Y. Kaji, J. Kawata, and S. Fujisawa, “Educational Effect of Participation in Robot Competition on Experience-Based Learning,” J. Robot. Mechatron., Vol.31, No.3, pp. 383-390, 2019.
- [7] R. Fukui, G. Kanayama, Y. Kato, R. Takahashi, and S. Warisawa, “Development of an Intersection Module for a Modularized Rail Structure – Implementation of Compliant Mechanisms for a Replacing Task of Movable Parts –,” J. Robot. Mechatron., Vol.30, No.3, pp. 467-476, 2018.
- [8] Y. Ohtsubo and M. Matsuyama, “Group Control of Mobile Robots for More Efficient Searches – Verification of Semi-Autonomous Trajectory Tracking Motions in Irregular Ground Environment –,” J. Robot. Mechatron., Vol.30, No.6, pp. 980-990, 2018.
- [9] H. Yamagata and T. Morita, “Design of Contest for Educational Underwater Robot for STEM: Learning Applying Modeling Based on Control Engineering,” J. Robot. Mechatron., Vol.29, No.6, pp. 957-968, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.