Development Report:
Robots Climbing Up and Down a Steep Stairs and Robots Retrieving Objects from High Places
Naoki Igo*, Shota Yamaguchi*, Noriyuki Kimura**, Kazuma Ueda*, Kenji Iseya***, Kazuma Kobayashi*, Toyoaki Tomura*, Satoshi Mitsui*, and Toshifumi Satake*
*National Institute of Technology, Asahikawa College
2-2-1-6 Shunkodai, Asahikawa, Hokkaido 071-8142, Japan
**Toyohashi University of Technology
1-1 Hibarigaoka, Tempaku-cho, Toyohashi, Aichi 441-8580, Japan
***University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8577, Japan

We designed and fabricated robots with various mechanisms to solve the problems set in the Creative Robot Contest for Decommissioning. Robots with various mechanisms were designed and manufactured to solve the problems set by the Creative Robot Contest for Decommissioning. More specifically, a mechanism that can climb up the stairs robustly was realized by attaching claws to the crawlers to solve the problem of climbing up a steep staircase while carrying a heavy load. For the task of retrieving simulated fuel debris from a high location, we developed a mechanism to raise and lower the robot and a mechanism to retrieve simulated fuel debris without fail. Consequently, we realized the idea of robot technology required for decommissioning work and training human resources involved in decommissioning work.
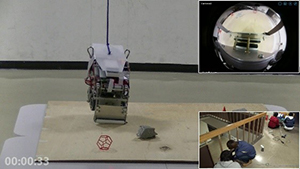
Robot for the 5th contest
- [1] A. Kogawa, M. Onda, and Y. Kai, “Development of a Remote-Controlled Drone System by Using Only Eye Movements: Design of a Control Screen Considering Operability and Microsaccades,” J. Robot. Mechatron., Vol.33, No.2, pp. 301-312, 2021.
- [2] S. Yuta, “Development of a Remotely Controlled Semi-Underwater Heavy Carrier Robot for Unmanned Construction Works,” J. Disaster Res., Vol.12, No.3, pp. 432-445, 2017.
- [3] M. L. Corradini, A. Monteriu, and G. Orlando, “An Actuator Failure Tolerant Control Scheme for an Underwater Remotely Operated Vehicle,” IEEE Trans. on Control Systems Technology, Vol.19, No.5, pp. 1036-1046, 2011.
- [4] J. Boehm, E. Berkenpas, C. Shepard, and D. A. Paley, “Tracking Performance of Model-Based Thruster Control of a Remotely Operated Underwater Vehicle,” IEEE J. of Oceanic Engineering, Vol.46, No.2, pp. 389-401, 2021.
- [5] S. Sugimura and K. Hoshino, “Wearable Hand Pose Estimation for Remote Control of a Robot on the Moon,” J. Robot. Mechatron., Vol.29, No.5, pp. 829-837, 2017.
- [6] K. Tokuda, T. Hirayama, T. Kinugasa, T. Haji, H. Amano, and K. Yasuda, “Complement Method for Obstructed Area on Images of Multiple Cameras Mounted Behind Crawler Shoe,” J. Robot. Mechatron., Vol.27, No.2, pp. 146-155, 2015.
- [7] R. Hayashi, K. Nicho, Y. Yu, T. Kinugasa, and H. Amano, “Small Search Robot Consisting of Plural Driving Wheels Connected by Flexible Shafts,” J. Robot. Mechatron., Vol.26, No.4, pp. 469-476, 2014.
- [8] J. Hirasawa, “Improvement of the Mobility on the Step-Field for a Stair Climbable Robot with Passive Crawlers,” J. Robot. Mechatron., Vol.32, No.4, pp. 780-788, 2020.
- [9] T. Haji, T. Kinugasa, S. Araki, D. Hanada, K. Yoshida, H. Amano, R. Hayashi, K. Tokuda, and M. Iribe, “New Body Design for Flexible Mono-Tread Mobile Track: Layered Structure and Passive Retro-Flexion,” J. Robot. Mechatron., Vol.26, No.4, pp. 460-468, 2014.
- [10] Y. Orita, K. Takaba, and T. Fukao, “Human Tracking of a Crawler Robot in Climbing Stairs,” J. Robot. Mechatron., Vol.33, No.6, pp. 1338-1348, 2021.
- [11] R. Fukui, G. Kanayama, Y. Kato, R. Takahashi, and S. Warisawa, “Development of an Intersection Module for a Modularized Rail Structure – Implementation of Compliant Mechanisms for a Replacing Task of Movable Parts –,” J. Robot. Mechatron., Vol.30, No.3, pp. 467-476, 2018.
- [12] K. Suzuki and K. Kawabata, “Development of a Robot Simulator for Decommissioning Tasks Utilizing Remotely Operated Robots,” J. Robot. Mechatron., Vol.32, No.6, pp. 1292-1300, 2020.
- [13] K. Terashima and K. Okumura, “A Prediction Method for the Dose Rate of Fuel Debris Depending on the Constituent Elements,” J. of Advanced Simulation in Science and Engineering, Vol.8, No.1, pp. 73-86, 2021.
- [14] H. Kim, D. Lee, C. W. Lee, H. R. Kim, and S. J. Lee, “Safety Assessment Framework for Nuclear Power Plant Decommissioning Workers,” IEEE Access, Vol.7, pp. 76305-76316, 2019.
- [15] I. Tsitsimpelis et al., “Simultaneous, Robot-Compatible γ-Ray Spectroscopy and Imaging of an Operating Nuclear Reactor,” IEEE Sensors J., Vol.21, No.4, pp. 5434-5443, 2021.
- [16] N. Marturi, A. Rastegarpanah, C. Takahashi, M. Adjigble, R. Stolkin, S. Zurek, M. Kopicki, M. Talha, J. A. Kuo, and Y. Bekiroglu, “Towards advanced robotic manipulation for nuclear decommissioning: A pilot study on tele-operation and autonomy,” 2016 Int. Conf. on Robotics and Automation for Humanitarian Applications (RAHA), pp. 1-8, 2016.
- [17] T. Yamada, H. Abe, and K. Kawabata, “Development of Testing Method Considering Tasks with Remotely Controlled Robots in Fukushima Daiichi Nuclear Power Station,” 2021 IEEE Int. Conf. on Intelligence and Safety for Robotics (ISR), pp. 131-134, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.