Letter:
Flexible Shoulder in Quadruped Animals and Robots Guiding Science of Soft Robotics
Akira Fukuhara*1, Megu Gunji*2, Yoichi Masuda*3, Kenjiro Tadakuma*4, and Akio Ishiguro*1
*1Research Institute of Electrical Communication, Tohoku University
2-1-1 Katahira, Aoba-ku, Sendai, Miyagi 980-8577, Japan
*2Department of Life Sciences, Faculty of Life Sciences, Toyo University
1-1-1 Izumino, Itakura-machi, Ora-gun, Gunma 374-0193, Japan
*3Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
*4Graduate School of Information Sciences, Tohoku University
6-6-01 Aramaki Aza-Aoba, Aoba-ku, Sendai, Miyagi 980-8579, Japan

Cursorial quadrupeds have different connections to the trunk for forelimbs and hindlimbs: a flexible connection through the muscles to the forelimb, and a secure connection through the hip joint to the hindlimb. Although anatomical and biological studies have described the structure and behavior of cursorial quadrupeds by focusing on flexible shoulders, the functionality of the flexible shoulder remains unclear. In this study, we first survey the anatomical and biological studies. Second, we introduce our robotics studies, which focus on flexible connections for proximal limb joints. Further, we discuss future directions for extracting a design principle based on complex animal body structures, and we suggest the potential for interdisciplinary research between anatomy and soft robotics.
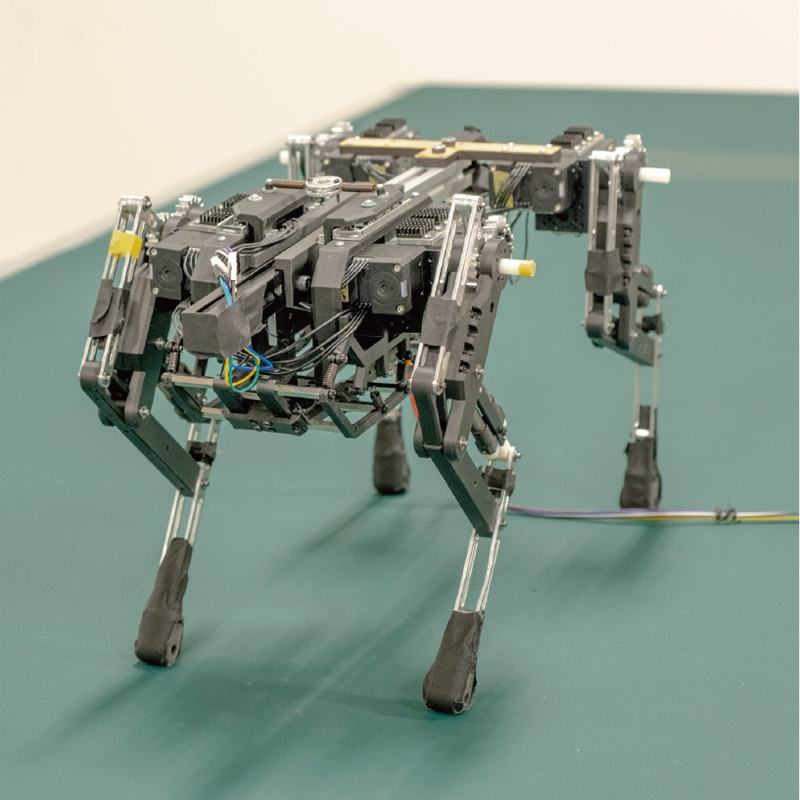
Developed quadrupedal robot mimicking the flexible shoulder in cursorial mammals
- [1] F. Ilievski, A. D. Mazzeo, R. F. Shepherd, X. Chen, and G. M. Whitesides, “Soft robotics for chemists,” Angew. Chem. Int. Ed. Engl., Vol.50, No.8, pp. 1890-1895, 2011.
- [2] S. Kim, C. Laschi, and B. Trimmer, “Soft robotics: a bioinspired evolution in robotics,” Trends Biotechnol., Vol.31, No.5, pp. 287-294, 2013.
- [3] B. Trimmer, “A journal of soft robotics: Why now?,” Soft Robotics, Vol.1, No.1, pp. 1-4, 2014.
- [4] C. Laschi and M. Cianchetti, “Soft robotics: New perspectives for robot bodyware and control,” Front Bioeng. Biotechnol., Vol.2, No.3, 3, 2014.
- [5] G. M. Whitesides, “Soft robotics,” Angew. Chem. Int. Ed. Engl., Vol.57, No.16, pp. 4258-4273, 2018.
- [6] K. Suzumori, “Plenary speakers: Soft robots as an E-kagen artifact,” Proc. of 2018 IEEE Int. Conf. on Soft Robotics (RoboSoft), pp. 1-7, 2018.
- [7] A. Spröwitz, A. Tuleu, M. Vespignani, M. Ajallooeian, E. Badri, and A. J. Ijspeert, “Towards dynamic trot gait locomotion: Design, control, and experiments with cheetah-cub, a compliant quadruped robot,” The Int. J. of Robotics Research, Vol.32, No.8, pp. 932-950, 2013.
- [8] H. W. Park, P. M. Wensing, and S. Kim, “High-speed bounding with the mit cheetah 2: Control design and experiments,” Int. J. of Robotics Research, Vol.36, No.2, pp. 167-192, 2017.
- [9] N. Gravish and G. V. Lauder, “Robotics-inspired biology,” J. Exp. Biol., Vol.221, No.7, jeb138438, 2018.
- [10] K. F. Liem et al. (Eds.), “Functional Anatomy of the Vertebrates: An Evolutionary Perspective (3rd ed.),” Brooks/Cole Publishing Company, 2001.
- [11] T. Hogervorst, H. W. Bouma, and J. De Vos, “Evolution of the hip and pelvis,” Acta. Orthop. Suppl., Vol.80, No.336, pp. 1-39, 2009.
- [12] E. Birch, J. Boyd, G. Doyle, and A. Pullen, “The effects of altered distances between obstacles on the jump kinematics and apparent joint angulations of large agility dogs,” Vet. J., Vol.204, No.2, pp. 174-178, 2015.
- [13] P. Biswal and P. K. Mohanty, “Development of quadruped walking robots: A review,” Ain. Shams. Engineering J., Vol.12, No.2, pp. 2017-2031, 2021.
- [14] A. Fukuhara, Y. Masuda, M. Gunji, K. Tadakuma, and A. Ishiguro, “Development of quadruped robot that can exploit shoulder hammock structure,” Proc. of 2020 IEEE/SICE Int. Symp. on System Integration (SII), pp. 1139-1143, 2020.
- [15] A. Fukuhara, M. Gunji, Y. Masuda, K. Tadakuma, and A. Ishiguro, “A bio-inspired quadruped robot exploiting flexible shoulder for stable and efficient walking,” Proc. of 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 7832-7839, 2020.
- [16] K. V. Kardong, “Vertebrates: comparative anatomy, function, evolution,” Heinle and Heinle Publishers, 1997.
- [17] P. E. Ahlberg, J. A. Clack, and H. Blom, “The axial skeleton of the devonian tetrapod ichthyostega,” Nature, Vol.437, No.7055, pp. 137-140, 2005.
- [18] Z. X. Luo, Q. Ji, and C. X. Yuan, “Convergent dental adaptations in pseudo-tribosphenic and tribosphenic mammals,” Nature, Vol.450, No.7166, pp. 93-97, 2007.
- [19] Z.-X. Luo, “Origin of the mammalian shoulder,” K. P. Dial, N. H. Shubin, and E. L. Brainerd (Eds.), “Great Transformations: Major Events in the History of Vertebrate Life,” The University of Chicago Press, Chicago, Illinois, pp. 167-187, 2015.
- [20] P. D. Polly, “Limbs in mammalian evolution,” B. K. Hall (Ed.), “Fins into Limbs: Evolution, Development, and Transformation,” University of Chicago Press, pp. 245-268, 2007.
- [21] F. A. Jenkins Jr., “The movement of the shoulder in claviculate and aclaviculate mammals,” J. Morphol., Vol.144, No.1, pp. 71-84, 1974.
- [22] S. Miller and F. G. Van Der Meche, “Movements of the forelimbs of the cat during stepping on a treadmill,” Brain Res., Vol.91, No.2, pp. 255-269, 1975.
- [23] A. W. English, “Functional analysis of the shoulder girdle of cats during locomotion,” J. Morphol., Vol.156, No.2, pp. 279-292, 1978.
- [24] A. Boczek-Funcke, J. P. Kuhtz-Buschbeck, and M. Illert, “Kinematic analysis of the cat shoulder girdle during treadmill locomotion: an x-ray study,” Eur. J. Neurosci., Vol.8, No.2, pp. 261-272, 1996.
- [25] M. S. Fischer, N. Schilling, M. Schmidt, D. Haarhaus, and H. Witte, “Basic limb kinematics of small therian mammals,” J. Exp. Biol., Vol.205, pp. 1315-1338, 2002.
- [26] R. C. Payne, P. Veenman, and A. M. Wilson, “The role of the extrinsic thoracic limb muscles in equine locomotion,” J. Anat., Vol.206, No.2, pp. 193-204, 2005.
- [27] D. R. Carrier, S. M. Deban, and T. Fischbein, “Locomotor function of the pectoral girdle ‘muscular sling’ in trotting dogs,” J. Exp. Biol., Vol.209, No.11, pp. 2224-2237, 2006.
- [28] D. R. Carrier, S. M. Deban, and T. Fischbein, “Locomotor function of forelimb protractor and retractor muscles of dogs: evidence of strut-like behavior at the shoulder,” J. Exp. Biol., Vol.211, No.1, pp. 150-162, 2008.
- [29] S. M. Deban, N. Schilling, and D. R. Carrier, “Activity of extrinsic limb muscles in dogs at walk, trot and gallop,” J. Exp. Biol., Vol.215, No.2, pp. 287-300, 2012.
- [30] Y. Fukuoka, H. Kimura, and A. H. Cohen, “Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts,” Int. J. of Robotics Research, Vol.22, No.3-4, pp. 187-202, 2003.
- [31] D. J. Hyun, S. Seok, J. Lee, and S. Kim, “High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the mit cheetah,” Int. J. of Robotics Research, Vol.33, No.11, pp. 1417-1445, 2014.
- [32] S. Nakatsu, A. Rosendo, M. Shimizu, and K. Hosoda, “Realization of three-dimensional walking of a cheetah-modeled bio-inspired quadruped robot,” Proc. of 2014 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO 2014), pp. 779-784, 2014.
- [33] E. Kazama, R. Sato, I. Miyamoto, A. Ming, and M. Shimojo, “Development of a small quadruped robot with bi-articular muscle-tendon complex,” Proc. of 2015 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 1059-1064, 2015.
- [34] A. Fukuhara, M. Gunji, Y. Masuda, K. Tadakuma, and A. Ishiguro, “Simulation study on galloping quadruped robot with flexible shoulder hammock structure,” Proc. of the 9.5th Int. Symp. on Adaptive Motion of Animals and Machines (AMAM2021), pp. 32-33, 2021.
- [35] A. Biewener and S. Patek, “Animal Locomotion,” Oxford University Press, 2018.
- [36] J. E. Bertram and A. Gutmann, “Motions of the running horse and cheetah revisited: fundamental mechanics of the transverse and rotary gallop,” J. R. Soc. Interface, Vol.6, No.35, pp. 549-559, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.