Letter:
Green Robotics: Toward Realization of Environmentally Friendly Soft Robots
Jun Shintake
Department of Mechanical and Intelligent Systems Engineering, The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

An important research direction in soft robotics could be the realization of environmentally friendly “green” soft robots that are biodegradable, sustainable, and recyclable. We present recent findings from our ongoing research on biodegradable robotic devices made of gelatin-based materials and discuss future directions in this contribution.
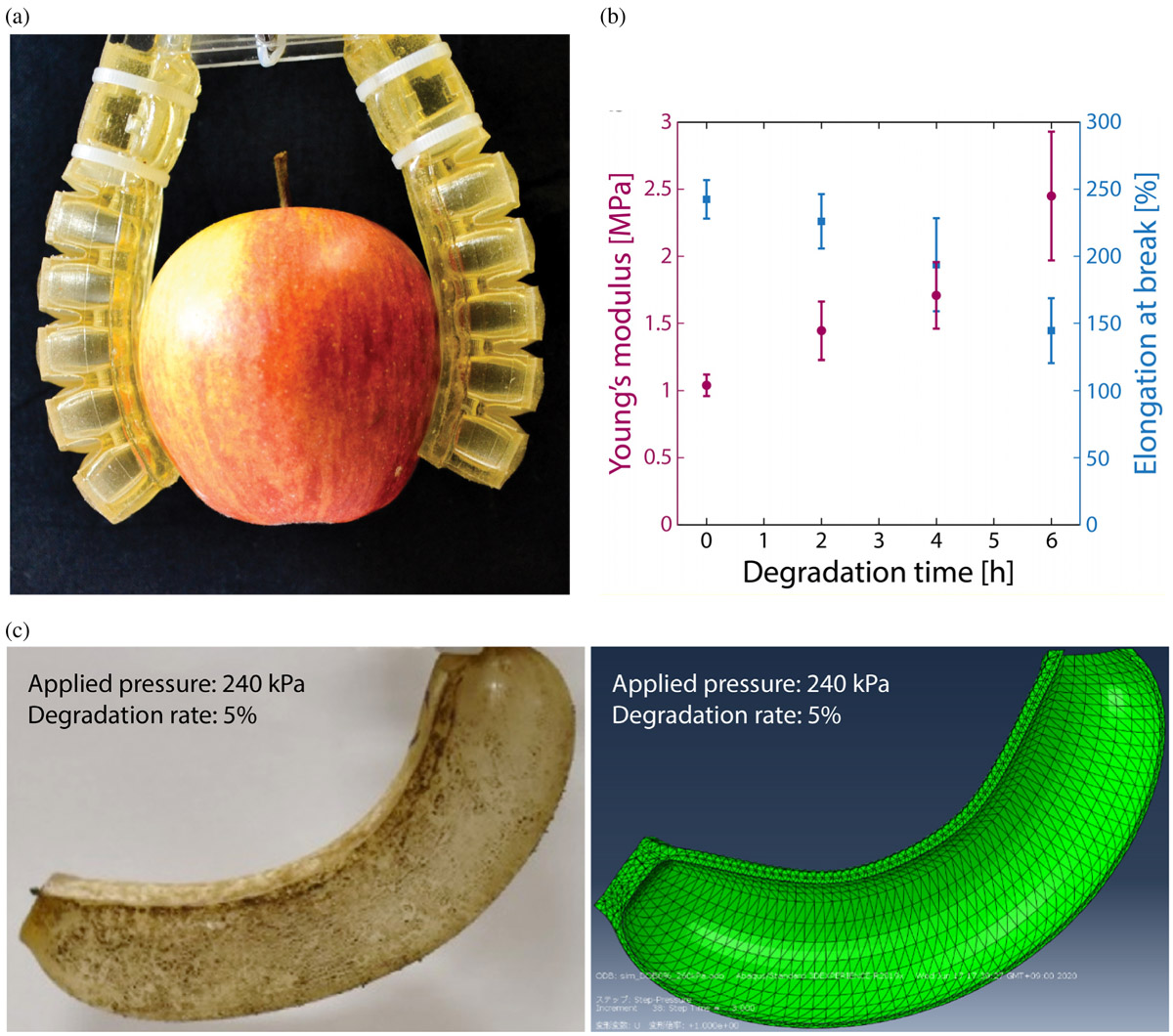
Gelatin based “green” soft actuators
- [1] D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, Vol.521, No.7553, pp. 467-475, doi: 10.1038/nature14543, 2015.
- [2] S. I. Rich, R. J. Wood, and C. Majidi, “Untethered soft robotics,” Nat. Electron., Vol.1, No.2, pp. 102-112, doi: 10.1038/s41928-018-0024-1, 2018.
- [3] J. Shintake, V. Cacucciolo, D. Floreano, and H. Shea, “Soft Robotic Grippers,” Adv. Mater., Vol.30, No.29, 1707035, doi: 10.1002/adma.201707035, 2018.
- [4] L. D. Chambers, J. Winfield, I. Ieropoulos, and J. Rossiter, “Biodegradable and edible gelatine actuators for use as artificial muscles,” Electroactive Polymer Actuators and Devices (EAPAD) 2014, Vol.9056, 90560B, doi: 10.1117/12.2045104, 2014.
- [5] J. Rossiter, J. Winfield, and I. Ieropoulos, “Here today, gone tomorrow: biodegradable soft robots,” Proc. of Electroactive Polymer Actuators and Devices (EAPAD) 2016, Vol.9798, 97981S, doi: 10.1117/12.2220611, 2016.
- [6] J. Shintake, H. Sonar, E. Piskarev, J. Paik, and D. Floreano, “Soft pneumatic gelatin actuator for edible robotics,” Proc. of IEEE Int. Conf. Intell. Robot. Syst., Vol.2017-Septe, pp. 6221-6226, doi: 10.1109/IROS.2017.8206525, 2017.
- [7] S. Walker et al., “Using an environmentally benign and degradable elastomer in soft robotics,” Int. J. Intell. Robot. Appl., Vol.1, No.2, pp. 124-142, doi: 10.1007/s41315-017-0016-8, 2017.
- [8] A. Zolfagharian, A. Kaynak, S. Y. Khoo, and A. Z. Kouzani, “Polyelectrolyte Soft Actuators: 3D Printed Chitosan and Cast Gelatin,” 3D Print. Addit. Manuf., Vol.5, No.2, pp. 138-150, doi: 10.1089/3dp.2017.0054, 2018.
- [9] M. Baumgartner et al., “Resilient yet entirely degradable gelatin-based biogels for soft robots and electronics,” Nat. Mater., Vol.19, No.10, pp. 1102-1109, doi: 10.1038/s41563-020-0699-3, 2020.
- [10] M. Irimia-Vladu, ““Green” electronics: biodegradable and biocompatible materials and devices for sustainable future,” Chem. Soc. Rev., Vol.43, No.2, pp. 588-610, doi: 10.1039/C3CS60235D, 2014.
- [11] W. Li et al., “Biodegradable Materials and Green Processing for Green Electronics,” Adv. Mater., Vol.32, No.33, 2001591, doi: 10.1002/adma.202001591, 2020.
- [12] T. Nagai and J. Shintake, “Characterization of Bio-Degradable Materials for Soft Robotics,” Proc. of 2019 Int. Symp. on Micro-NanoMechatronics and Human Science (MHS), pp. 1-3, doi: 10.1109/MHS48134.2019.9249087, 2019.
- [13] T. Nagai and J. Shintake, “Simulation Analysis of Soft Actuators Made of a Biodegradable Material,” Proc. JSME Annu. Conf. Robot. Mechatronics, Vol.2020, 1P2-A05, doi: 10.1299/jsmermd.2020.1P2-A05, 2020.
- [14] T. Nagai, A. Kurita, and J. Shintake, “Characterization of Sustainable Robotic Materials and Finite Element Analysis of Soft Actuators Under Biodegradation,” Front. Robot. AI, Vol.8, 383, doi: 10.3389/FROBT.2021.760485/BIBTEX, 2021.
- [15] T. H. Yang, H. Hida, D. Ichige, J. Mizuno, C. R. Kao, and J. Shintake, “Foldable Kirigami Paper Electronics,” Phys. Status Solidi., Vol.217, No.9, 1900891, doi: 10.1002/pssa.201900891, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.