Letter:
Biomimetic Soft Wings for Soft Robot Science
Hiroto Tanaka*, Toshiyuki Nakata**, and Takeshi Yamasaki***
*Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8550, Japan
**Chiba University
1-33 Yayoi-cho, Inage-ku, Chiba-shi, Chiba 263-8522, Japan
***Yamashina Institute for Ornithology
115 Konoyama, Abiko-shi, Chiba 270-1145, Japan

Flight and swimming in nature can inspire the design of highly adaptive robots capable of working in complex environments. In this letter, we reviewed our work on robotic propulsion in the air and water, with a specific focus on the crucial functions of elastic components involved in the driving mechanism and flapping wings. Elasticity in the driving mechanism inspired by birds and insects can enhance both the aerodynamic efficiency of flapping wings and robustness against disturbances with appropriate design. A flapping wing surface with a stiffness distribution inspired by hummingbirds was fabricated by combining tapered spars and ribs with a thin film. The biomimetic flexible wing could generate more lift than the nontapered wing with a similar amount of power consumption. Underwater flapping-wing propulsion inspired by penguins was investigated by combining the 3-degree-of-freedom (DoF) flapping mechanism and hydrodynamic calculation, which indicates that wing bending increases the propulsion efficiency. This work demonstrates the importance of passive deformation of both wing surfaces and driving mechanisms for improving the fluid dynamic efficiency and robustness in flight and swimming, as well as providing biological insight from an engineering perspective.
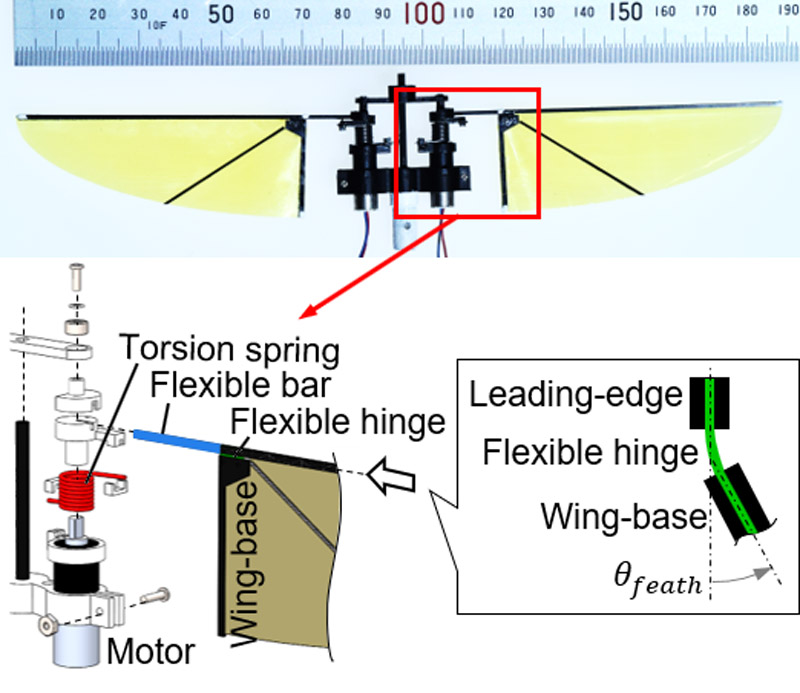
Flapping-wing robot with elastic parts
- [1] T. Bachmann, J. Emmerlich, W. Baumgartner, J. M. Schneider, and H. Wagner, “Flexural stiffness of feather shafts: geometry rules over material properties,” J. Exp. Biol., Vol.215, Issue 3, pp. 405-415, 2012.
- [2] S. A. Combes and T. L. Daniel, “Flexural stiffness in insect wings I. Scaling and the influence of wing venation,” J. Exp. Biol., Vol.206, Issue 17, pp. 2979-2987, 2003.
- [3] S. M. Walker, D. A. Schwyn, R. Mokso, M. Wicklein, T. Müller, M. Doube, M. Stampanoni, H. G. Krapp, and G. K. Taylor, “In vivo time-resolved microtomography reveals the mechanics of the blowfly flight motor,” PLoS Biol., Vol.12, Issue 3, e1001823, 2014.
- [4] J. Young, S. M. Walker, R. J. Bomphrey, G. K. Taylor, and A. L. R. Thomas, “Details of insect wing design and deformation enhance aerodynamic function and flight efficiency,” Science, Vol.325, Issue 5947, pp. 1549-1552, 2009.
- [5] M. H. Dickinson and J. R. B. Lighton, “Muscle efficiency and elastic storage in the flight motor of Drosophila,” Science, Vol.268, Issue 5207, pp. 87-90, 1995.
- [6] B. W. Tobalske and A. A. Biewener, “Contractile properties of the pigeon supracoracoideus during different modes of flight,” J. Exp. Biol., Vol.211, Issue 2, pp. 170-179, 2008.
- [7] K. Suzumori, “Plenary speakers: Soft robots as an E-kagen artifact,” 2018 IEEE Int. Conf. on Soft Robotics, pp. 1-7, 2018.
- [8] V. M. Ortega-Jimenez, N. Sapir, M. Wolf, E. A. Variano, and R. Dudley, “Into turbulent air: size-dependent effects of von Kármán vortex streets on hummingbird flight kinematics and energetics,” Proc. R. Soc. B., Vol.281, Issue 1783, doi: 10.1098/rspb.2014.0180, 2014.
- [9] M. Matthews and S. Sponberg, “Hawkmoth flight in the unsteady wakes of flowers,” J. Exp. Biol., Vol.221, Issue 22, doi: 10.1242/jeb.179259, 2018.
- [10] S. Koizumi, T. Nakata, and H. Liu, “Flexibility Effects of a Flapping Mechanism Inspired by Insect Musculoskeletal System on Flight Performance,” Front. Bioeng. Biotechnol., Vol.9, doi: 10.3389/fbioe.2021.612183, 2021.
- [11] M. Maeda, T. Nakata, I. Kitamura, H. Tanaka, and H. Liu, “Quantifying the dynamic wing morphing of hovering hummingbird,” R. Soc. Open Sci., Vol.4, Issue 9, doi: 10.1098/rsos.170307, 2017.
- [12] T. Nozawa, K. Nakamura, R. Katsuyama, S. Kuwajima, Z. Li, A. Nomizu, R. Okamoto, T. Munakata, and T. Watanabe, “The WiFly: Flapping-Wing Small Unmanned Aerial Vehicle with Center-of-Gravity Shift Mechanism,” J. Robot. Mechatron., Vol.33, No.2, pp. 205-215, 2021.
- [13] K. Sanuki and T. Fujikawa, “Motion Analysis of Butterfly-Style Flapping Robot Using CFD Based on 3D-CAD Model and Experimental Flight Data,” J. Robot. Mechatron., Vol.33, No.2, pp. 216-222, 2021.
- [14] A. Kawahara, M. Aizawa, T. Yamasaki, and H. Tanaka, “Fabrication of a Hummingbird-Mimetic Flexible Flapping Wings,” 30th 2019 Int. Symp. on Micro-NanoMechatronics and Human Science (MHS 2019), 2019.
- [15] J. P. Whitney, P. S. Sreetharan, K. Y. Ma, and R. J. Wood, “Pop-up book MEMS,” J. Micromech. Microeng., Vol.21, No.11, 115021, 2011.
- [16] M. Aizawa, H. Tanaka, and T. Yamasaki, “Study of high-performance elastic wings for hummingbird-inspired flapping-wing aerial vehicles,” Proc. of the JSME Conf. on Frontiers in Bioengineering, 2C24, 2018 (in Japanese).
- [17] R. Bannasch, “Hydrodynamics of penguins - An experimental approach,” The Penguins: ecology and management, Surrey Beatty & Sons Pty Ltd., pp. 141-176, 1995.
- [18] N. Harada, T. Oura, M. Maeda, Y. Shen, D. M. Kikuchi, and H. Tanaka, “Kinematics and hydrodynamics analyses of swimming penguins: wing bending improves propulsion performance,” J. Exp. Biol., Vol.224, Issue 21, doi: 10.1242/jeb.242140, 2021.
- [19] Y. Shen, N. Harada, S. Katagiri, and H. Tanaka, “Biomimetic Realization of a Robotic Penguin Wing: Design and Thrust Characteristics,” IEEE/ASME Trans. on Mechatronics, Vol.26, Issue 5, pp. 2350-2361, doi: 10.1109/TMECH.2020.3038224, 2021.
- [20] N. Gravish and G. V. Lauder, “Robotics-inspired biology,” J. Exp. Biol., Vol.221, Issue 7, doi: 10.1242/jeb.138438, 2018.
- [21] Y. Murayama, T. Nakata, and H. Liu, “Flexible Flaps Inspired by Avian Feathers Can Enhance Aerodynamic Robustness in Low Reynolds Number Airfoils,” Front. Bioeng. Biotechnol., Vol.9, doi: 10.3389/fbioe.2021.612182, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.