Letter:
Toward Self-Modifying Bio-Soft Robots
Takuya Umedachi* and Masahiro Shimizu**
*Faculty of Textile Science and Technology, Shinshu University
3-15-1 Tokida, Ueda City, Nagano 386-8567, Japan
**Department of Systems Innovation, Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama-cho, Toyonaka, Osaka 560-8531, Japan

Soft robotics can dramatically increase the affinity between machines and biological systems. Designing the machine/device to be soft and deformable allows the biological system to interact with the robotic system(s) mechanically, electronically, and chemically. This advantage is evident from the rapid growth of collaborative robotics, where a robot can be mechanically guided by an operator to learn motions from them without the need for coding. This letter introduces a method for combining a soft robotic system with a biological system, demonstrated through a series of case studies of ongoing research projects. These various projects have a common purpose in creating self-modifying bio-soft robots.
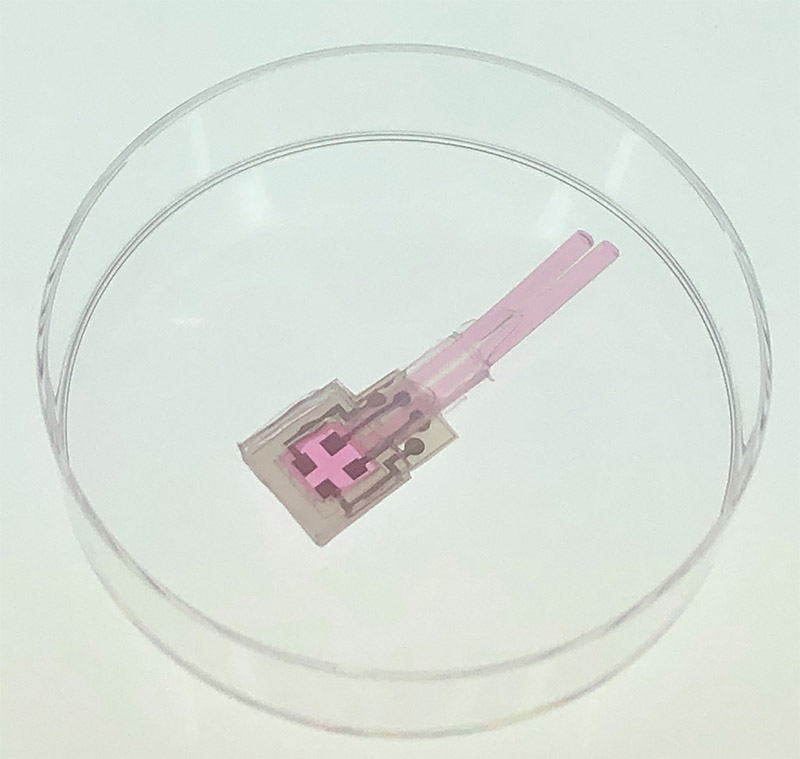
Cell tactile sensor built on nano sheets
- [1] D. Trivedi, C. D. Rahn, W. M. Kier, and I. D. Walker, “Soft Robotics: Biological Inspiration, State of the Art, and Future Research,” Appl. Bionics Biomechanics, Vol.5, pp. 99-117, doi: 10.1080/11762320802557865, 2008.
- [2] S. Kim, C. Laschi, and B. Trimmer, “Soft robotics: a bioinspired evolution in robotics,” Trends in Biotechnology, Vol.31, pp. 287-294, 2013.
- [3] R. Pfeifer, M. Lungarella, and F. Iida, “The challenges ahead for bio-inspired ‘soft’ robotics,” Communications of the ACM, Vol.55, pp. 76-87, 2012.
- [4] D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, Vol.521, pp. 467-475, 2015.
- [5] C. Laschi, M. Cianchetti, B. Mazzolai, L. Margheri, M. Follador, and P. Dario, “Soft robot arm inspired by the octopus,” Advanced Robotics, Vol.26, pp. 709-727, 2012.
- [6] J. A. Engler, S. Sen, J. H. Sweeney, and E. D. Discher, “Matrix Elasticity Directs Stem Cell Lineage Specification,” Cell, Vol.126, Issue 4, pp. 677-689, 2006.
- [7] M. Shimizu, T. Fujie, T. Umedachi, S. Shigaki, H. Kawashima, M. Saito, H. Ohashi, and K. Hosoda, “Self-healing Cell Tactile Sensor Fabricated Using Ultraflexible Printed Electrodes,” Proc. 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 8932-8938, 2020.
- [8] M. Shimizu, K. Maekawa, K. Kitaiwa, and K. Hosoda, “Micro-robot Driven by Cardiac Cells That Cooperatively Beating,” Proc. 2018 IEEE Int. Conf. on Cyborg and Bionic Systems (CBS), pp. 97-100, 2018.
- [9] T. Ohshima, T. Tachi, and Y. Yamaguchi, “Analysis and design of elastic materials formed using 2D repetitive slit pattern,” Proc. of IASS Annual Symposia IASS 2015 Amsterdam Symp.: Future Visions – Computation and Geometry, pp. 1-12, 2015.
- [10] S. Iyobe, M. Shimizu, and T. Umedachi, “Various Movements of a Single Motor Driven Robot Utilizing Resonance of Multiple Living Hinges,” RSJ2020, 2A3-03, 2020 (in Japanese).
- [11] K. Hanaoka, M. Shimizu, and T. Umedachi, “Development of 3D Printed Structure That Visualizes Bending and Compression Deformations for Soft-Bodied Robots,” Proc. of 2021 IEEE 4th Int. Conf. on Soft Robotics (RoboSoft), Wed9Pos.6, 2021.
- [12] M. Shimizu, T. Mori, and A. Ishiguro, “A Development of a Modular Robot That Enables Adaptive Reconfiguration,” Proc. of 2006 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 174-179, 2006.
- [13] T. Umedachi, V. Vikas, and B. A. Trimmer, “Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots,” Bioinspiration & Biomimetics, Vol.11, No.2, 025001, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.