Review:
Review of Electronics-Free Robotics: Toward a Highly Decentralized Control Architecture
Yoichi Masuda and Masato Ishikawa
Department of Mechanical Engineering, Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

In recent years, conventional model-based motion control has become more challenging owing to the continuously increasing complexity of areas in which robots must operate and navigate. A promising approach for solving this issue is by employing interaction-based robotics, which includes behavior-based robotics, morphological computations, and soft robotics that generate control and computation functions based on interactions between the robot body and environment. These control strategies, which incorporate the diverse dynamics of the environment to generate control and computation functions, may alleviate the limitations imposed by the finite physical and computational resources of conventional robots. However, current interaction-based robots can only perform a limited number of actions compared with conventional robots. To increase the diversity of behaviors generated from body–environment interactions, a robotic body design methodology that can generate appropriate behaviors depending on the various situations and environmental stimuli that arise from them is necessitated. Electronics-free robotics is reviewed herein as a paradigm for designing robots with control and computing functions in each part of the body. In electronics-free robotics, instead of using electrical sensors or computers, a control system is constructed based on only mechanical or chemical reactions. Robotic bodies fabricated using this approach do not require bulky electrical wiring or peripheral circuits and can perform control and computational functions by obtaining energy from a central source. Therefore, by distributing these electronics-free controllers throughout the body, we hope to design autonomous and highly decentralized robotic bodies than can generate various behaviors in response to environmental stimuli. This new paradigm of designing and controlling robot bodies can enable realization of completely electronics-free robots as well as expand the range of conventional electronics-based robot designs.
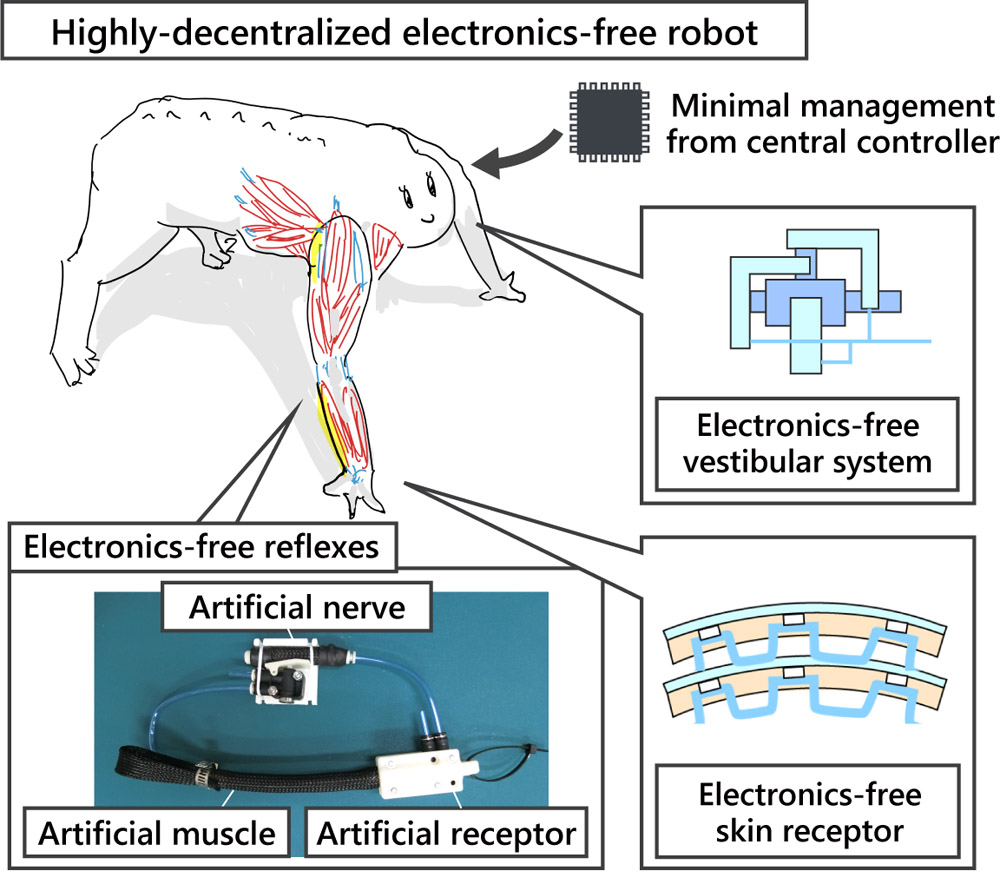
Future vision of electronics-free robots
- [1] R. Pfeifer and J. Bongard, “How the body shapes the way we think: a new view of intelligence,” MIT Press, 2006.
- [2] T. McGeer, “Passive dynamic walking,” Int. J. Robotics Res., Vol.9, No.2, pp. 62-82, 1990.
- [3] S. Collins, A. Ruina, R. Tedrake, and M. Wisse, “Efficient Bipedal Robots Based on Passive-Dynamic Walkers,” Science, Vol.307, No.5712, pp. 1082-1085, 2005.
- [4] D. Owaki, K. Osuka, and A. Ishiguro, “On the embodiment that enables passive dynamic bipedal running,” 2008 IEEE Int. Conf. on Robotics and Automation, pp. 341-346, 2008.
- [5] Y. Masuda, K. Naniwa, M. Ishikawa, and K. Osuka, “Brainless Walking: Animal Gaits Emerge From an Actuator Characteristic,” Front Robot AI, Vol.8, Article No.629679, 2021.
- [6] M. Reis and F. Iida, “An Energy-Efficient Hopping Robot Based on Free Vibration of a Curved Beam,” IEEE/ASME Trans. on Mechatronics, Vol.19, No.1, pp. 300-311, 2014.
- [7] H. Yokoi, A. H. Arieta, R. Katoh, W. Yu, I. Watanabe, and M. Maruishi, “Mutual adaptation in a prosthetics application,” F. Iida, R. Pfeifer, L. Steels, and Y. Kuniyoshi (Eds.), “Embodied Artificial Intelligence,” pp. 146-159, Springer, 2004.
- [8] K. Hosoda, S. Sekimoto, Y. Nishigori, S. Takamuku, and S. Ikemoto, “Anthropomorphic Muscular–Skeletal Robotic Upper Limb for Understanding Embodied Intelligence,” Advanced Robotics, Vol.26, No.7, pp. 729-744, 2012.
- [9] K. Suzumori, S. Iikura, and H. Tanaka, “Development of flexible microactuator and its applications to robotic mechanisms,” Proc. of 1991 IEEE Int. Conf. on Robotics and Automation, doi: 10.1109/ROBOT.1991.131850, 1991.
- [10] H. Hauser, A. J. Ijspeert, R. M. Füchslin, R. Pfeifer, and W. Maass, “Towards a theoretical foundation for morphological computation with compliant bodies,” Biological Cybernetics, Vol.105, No.5, pp. 355-370, 2011.
- [11] H. Hauser, A. J. Ijspeert, R. M. Füchslin, R. Pfeifer, and W. Maass, “The role of feedback in morphological computation with compliant bodies,” Biological Cybernetics, Vol.106, No.10, pp. 595-613, 2012.
- [12] T. Freeth, Y. Bitsakis, X. Moussas et al., “Decoding the ancient Greek astronomical calculator known as the Antikythera Mechanism,” Nature, Vol.444, No.7119, pp. 587-591, 2006.
- [13] A. G. Bromley, “Charles Babbage’s analytical engine, 1838,” IEEE Annals of the History of Computing, Vol.4, No.3, pp. 196-217, 1982.
- [14] V. Bush, “The differential analyzer. A new machine for solving differential equations,” J. of the Franklin Institute, Vol.212, No.4, pp. 447-488, 1931.
- [15] Ford Instrument Company, “Basic Fire Control Mechanisms,” Ordnance Pamphlet 1144, Bureau of Ordnance, 1944.
- [16] J. C. Maxwell, “I. On governors,” Proc. of the Royal Society of London, No.16, pp. 270-283, 1868.
- [17] A. Newpower, “Iron Men and Tin Fish: The Race to Build a Better Torpedo during World War II,” ABC-CLIO, 2006.
- [18] N. J. Nilsson, “Artificial intelligence: a new synthesis,” Morgan Kaufmann, 1998.
- [19] W. G. Walter, “The living brain,” Norton, 1953.
- [20] V. Braitenberg, “Vehicles: Experiments in synthetic psychology,” MIT Press, 1986.
- [21] R. A. Brooks, “New approaches to robotics,” Science, Vol.253, No.5025, pp. 1227-1232, 1991.
- [22] R. A. Brooks, “Intelligence without representation,” Artificial intelligence, Vol.47, No.1-3, pp. 139-159, 1991.
- [23] M. Maris and R. Boeckhorst, “Exploiting physical constraints: heap formation through behavioral error in a group of robots,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS’96), Vol.3, pp. 1655-1660, 1996.
- [24] R. Pfeifer and J. Bongard, “How the body shapes the way we think: a new view of intelligence,” MIT Press, 2006.
- [25] M. Wehner, R. L. Truby, D. J. Fitzgerald, B. Mosadegh, G. M. Whitesides, J. A. Lewis, and R. J. Wood, “An integrated design and fabrication strategy for entirely soft, autonomous robots,” Nature, Vol.536, No.7617, pp. 451-455, 2016.
- [26] M. Garrad, G. Soter, A. T. Conn, H. Hauser, and J. Rossiter, “A soft matter computer for soft robots,” Sci. Robot., Vol.4, No.33, 2019.
- [27] D. Drotman, S. Jadhav, D. Sharp, C. Chan, and M. T. Tolley, “Electronics-free pneumatic circuits for controlling soft-legged robots,” Sci. Robot., Vol.6, No.51, 2021.
- [28] J. D. Hubbard, R. Acevedo, K. M. Edwards, A. T. Alsharhan, Z. Wen, J. Landry, K. Wang, S. Schaffer, and R. D. Sochol, “Fully 3D-printed soft robots with integrated fluidic circuitry,” Sci. Adv., Vol.7, No.29, 2021.
- [29] Y. Masuda, K. Naniwa, M. Ishikawa, and K. Osuka, “Weak actuators generate adaptive animal gaits without a brain,” 2017 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 2638-2645, 2017.
- [30] Y. Masuda, K. Miyashita, K. Yamagishi, M. Ishikawa, and K. Hosoda, “Brainless running: a quasi-quadruped robot with decentralized spinal reflexes by solely mechanical devices,” 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4020-4025, 2021.
- [31] E. M. Henke, S. Schlatter, and I. A. Anderson, “Soft Dielectric Elastomer Oscillators Driving Bioinspired Robots,” Soft Robot., Vol.4, No.4, pp. 353-366, 2017.
- [32] P. Rothemund, A. Ainla, L. Belding, D. J. Preston, S. Kurihara, Z. Suo, and G. M. Whitesides, “A soft, bistable valve for autonomous control of soft actuators,” Sci. Robot., Vol.3, No.16, 2018.
- [33] K. Xu and N. O. Pérez-Arancibia, “Electronics-Free Logic Circuits for Localized Feedback Control of Multi-Actuator Soft Robots,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 3990-3997, 2020.
- [34] S. Hoang, K. Karydis, P. Brisk, and W. H. Grover, “A pneumatic random-access memory for controlling soft robots,” PLoS One, Vol.16, No.7, Article No.0254524, 2021.
- [35] H. Yasuda, P. R. Buskohl, A. Gillman, T. D. Murphey, S. Stepney, R. A. Vaia, and J. R. Raney, “Mechanical computing,” Nature, Vol.598, No.7879, pp. 39-48, 2021.
- [36] Y. Masuda, M. Ishikawa, and A. Ishiguro, “Weak DC Motors Generate Earthworm Locomotion Without a Brain,” Biomimetic and Biohybrid Systems: 7th Int. Conf. Living Machines 2018, pp. 304-315, 2018.
- [37] Y. Masuda, Y. Minami, and M. Ishikawa, “Vibration based motion generation without any sensor or microprocessor,” Asian J. of Control, Vol.23, No.6, pp. 2587-2596, 2020.
- [38] H. M. Oliveira and L. V. Melo, “Huygens synchronization of two clocks,” Sci. Rep., Vol.5, Article No.11548, 2015.
- [39] S. H. Strogatz, D. M. Abrams, A. McRobie, B. Eckhardt, and E. Ott, “Crowd synchrony on the Millennium Bridge,” Nature, Vol.438, No.7064, pp. 43-44, 2005.
- [40] E. Takane, K. Tadakuma, T. Yamamoto, M. Konyo, and S. Tadokoro, “A mechanical approach to realize reflexive omnidirectional bending motion for pneumatic continuum robots,” Robomech J., Vol.3, Article No.28, 2016.
- [41] H. Ryu, Y. Nakata, Y. Nakamura, and H. Ishiguro, “Adaptive Whole-Body Dynamics: An Actuator Network System for Orchestrating Multijoint Movements,” IEEE Robotics and Automation Magazine, Vol.23, No.3, pp. 85-92, 2016.
- [42] K. Tani, H. Nabae, G. Endo, and K. Suzumori, “Pneumatic Soft Actuator Using Self-Excitation Based on Automatic-Jet-Switching-Structure,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 4042-4048, 2020.
- [43] Q. Zhao, K. Nakajima, H. Sumioka, H. Hauser, and R. Pfeifer, “Spine dynamics as a computational resource in spine-driven quadruped locomotion,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1445-1451, 2013.
- [44] N. Vasios, A. J. Gross, S. Soifer, J. T. B. Overvelde, and K. Bertoldi, “Harnessing Viscous Flow to Simplify the Actuation of Fluidic Soft Robots,” Soft Robot., Vol.7, No.1, pp. 1-9, 2020.
- [45] N. Lobontiu, “Compliant mechanisms: design of flexure hinges,” CRC Press, 2002.
- [46] B. Zhu, X. Zhang, H. Zhang, J. Liang, H. Zang, H. Li, and R. Wang, “Design of compliant mechanisms using continuum topology optimization: A review,” Mechanism and Machine Theory, Vol.143, Article No.103622, 2020.
- [47] A. Ion, J. Frohnhofen, L. Wall, R. Kovacs, M. Alistar, J. Lindsay, P. Lopes, H.-T. Chen, and P. Baudisch, “Metamaterial Mechanisms,” Proc. of the 29th Annual Symp. on User Interface Software and Technology, pp. 529-539, 2016.
- [48] S. M. Felton, D.-Y. Lee, K.-J. Cho, and R. J. Wood, “A Passive, Origami-Inspired Continuously Variable Transmission,” 2014 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2913-2918, 2014.
- [49] R. C. Merkle, R. A. Freitas, T. Hogg, T. E. Moore, M. S. Moses, and J. Ryley, “Mechanical Computing Systems Using Only Links and Rotary Joints,” J. of Mechanisms and Robotics, Vol.10, No.6, 2018.
- [50] C. El Helou, P. R. Buskohl, C. E. Tabor, and R. L. Harne, “Digital logic gates in soft, conductive mechanical metamaterials,” Nat. Commun., Vol.12, No.1, Article No.1633, 2021.
- [51] T. Umedachi, R. Idei, K. Ito, and A. Ishiguro, “True-slime-mould-inspired hydrostatically coupled oscillator system exhibiting versatile behaviours,” Bioinspir. Biomim., Vol.8, No.3, Article No.035001, 2013.
- [52] Y. Okadome, Y. Nakamura, K. Urai, Y. Nakata, and H. Ishiguro, “HUMA: A human-like musculoskeletal robot platform for physical interaction studies,” 2015 IEEE-RAS 15th Int. Conf. on Humanoid Robots (Humanoids), pp. 676-683, 2015.
- [53] H. Ahmad, Y. Nakata, Y. Nakamura, and H. Ishiguro, “PedestriANS: a bipedal robot with adaptive morphology,” Adaptive Behavior, Vol.29, No.4, pp. 369-382, 2020.
- [54] D. J. Preston, H. J. Jiang, V. Sanchez, P. Rothemund, J. Rawson, M. P. Nemitz, W. K. Lee, Z. Suo, C. J. Walsh, and G. M. Whitesides, “A soft ring oscillator,” Sci. Robot., Vol.4, No.31, 2019.
- [55] Y. Miyaki and H. Tsukagoshi, “Self-Excited Vibration Valve That Induces Traveling Waves in Pneumatic Soft Mobile Robots,” IEEE Robotics and Automation Letters, Vol.5, No.3, pp. 4133-4139, 2020.
- [56] K. Tani, H. Nabae, G. Endo, and K. Suzumori, “Proposal and Prototyping of Self-Excited Pneumatic Actuator Using Automatic-Flow-Path-Switching-Mechanism,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 3058-3065, 2020.
- [57] E. Kitamura, H. Nabae, G. Endo, and K. Suzumori, “Self-excitation pneumatic soft actuator inspired by vocal cords,” Sensors and Actuators, A: Physical, Vol.331, Article No.112816, 2021.
- [58] D. Glozman, N. Hassidov, M. Senesh, and M. Shoham, “A self-propelled inflatable earthworm-like endoscope actuated by single supply line,” IEEE Trans. Biomed. Eng., Vol.57, No.6, pp. 1264-1272, 2010.
- [59] J. T. Overvelde, T. Kloek, J. D’Haen, and K. Bertoldi, “Amplifying the response of soft actuators by harnessing snap-through instabilities,” Proc. of the National Academy of Sciences, Vol.112, No.35, pp. 10863-10868, 2015.
- [60] Y.-W. Chen, W.-J. Lin, Y. Chen, and L.-P. Cheng, “PneuSeries: 3D Shape Forming with Modularized Serial-Connected Inflatables,” The 34th Annual ACM Symp. on User Interface Software and Technology, pp. 431-440, 2021.
- [61] M. W. Toepke, V. V. Abhyankar, and D. J. Beebe, “Microfluidic logic gates and timers,” Lab Chip, Vol.7, No.11, pp. 1449-1453, 2007.
- [62] M. Prakash and N. Gershenfeld, “Microfluidic bubble logic,” Science, Vol.315, No.5813, pp. 832-835, 2007.
- [63] M. Rhee and M. A. Burns, “Microfluidic pneumatic logic circuits and digital pneumatic microprocessors for integrated microfluidic systems,” Lab Chip, Vol.9, No.21, pp. 3131-3143, 2009.
- [64] B. Mosadegh, T. Bersano-Begey, J. Y. Park, M. A. Burns, and S. Takayama, “Next-generation integrated microfluidic circuits,” Lab Chip, Vol.11, No.17, pp. 2813-2818, 2011.
- [65] P. N. Duncan, T. V. Nguyen, and E. E. Hui, “Pneumatic oscillator circuits for timing and control of integrated microfluidics,” Proc. of the National Academy of Sciences, Vol.110, No.45, pp. 18104-18109, 2013.
- [66] Q. M. Nguyen, J. Abouezzi, and L. Ristroph, “Early turbulence and pulsatile flows enhance diodicity of Tesla’s macrofluidic valve,” Nat. Commun., Vol.12, No.1, Article No.2884, 2021.
- [67] T. Ranzani, S. Russo, N. W. Bartlett, M. Wehner, and R. J. Wood, “Increasing the Dimensionality of Soft Microstructures through Injection-Induced Self-Folding,” Adv. Mater., Vol.30, No.38, Article No.1802739, 2018.
- [68] A. A. Amiri Moghadam, S. Alaie, S. Deb Nath, M. Aghasizade Shaarbaf, J. K. Min, S. Dunham, and B. Mosadegh, “Laser Cutting as a Rapid Method for Fabricating Thin Soft Pneumatic Actuators and Robots,” Soft Robot., Vol.5, No.4, pp. 443-451, 2018.
- [69] B. Mosadegh, A. D. Mazzeo, R. F. Shepherd, S. A. Morin, U. Gupta, I. Z. Sani, D. Lai, S. Takayama, and G. M. Whitesides, “Control of soft machines using actuators operated by a Braille display,” Lab Chip, Vol.14, No.1, pp. 189-199, 2014.
- [70] C. C. Glick, M. T. Srimongkol, A. J. Schwartz, W. S. Zhuang, J. C. Lin, R. H. Warren, D. R. Tekell, P. A. Satamalee, and L. Lin, “Rapid assembly of multilayer microfluidic structures via 3D-printed transfer molding and bonding,” Microsyst. Nanoeng., Vol.2, Article No.16063, 2016.
- [71] Q. Zheng, C. Xu, Z. Jiang, M. Zhu, C. Chen, and F. Fu, “Smart Actuators Based on External Stimulus Response,” Front. Chem., Vol.9, Article No.650358, 2021.
- [72] H. Kim, S.-k. Ahn, D. M. Mackie, J. Kwon, S. H. Kim, C. Choi, Y. H. Moon, H. B. Lee, and S. H. Ko, “Shape morphing smart 3D actuator materials for micro soft robot,” Materials Today, Vol.41, pp. 243-269, 2020.
- [73] Q. Shi, H. Liu, D. Tang, Y. Li, X. Li, and F. Xu, “Bioactuators based on stimulus-responsive hydrogels and their emerging biomedical applications,” NPG Asia Materials, Vol.11, Article No.64, 2019.
- [74] L. Tang, L. Wang, X. Yang, Y. Feng, Y. Li, and W. Feng, “Poly(N-isopropylacrylamide)-based smart hydrogels: Design, properties and applications,” Progress in Materials Science, Vol.115, Article No.100702, 2021.
- [75] Y. Mao, K. Yu, M. S. Isakov, J. Wu, M. L. Dunn, and H. Jerry Qi, “Sequential Self-Folding Structures by 3D Printed Digital Shape Memory Polymers,” Sci. Rep., Vol.5, Article No.13616, 2015.
- [76] Y. Liu, J. K. Boyles, J. Genzer, and M. D. Dickey, “Self-folding of polymer sheets using local light absorption,” Soft Matter, Vol.8, No.6, pp. 1764-1769, 2012.
- [77] H. Shigemune, S. Maeda, E. Iwase, S. Hashimoto, S. Sugano, and H. Sawada, “Programming Stepwise Motility into a Sheet of Paper Using Inkjet Printing,” Advanced Intelligent Systems, Vol.3, No.1, 2020.
- [78] S. Maeda, Y. Hara, R. Yoshida, and S. Hashimoto, “Peristaltic Motion of Polymer Gels,” Angewandte Chemie Int. Edition, Vol.120, No.35, pp. 6792-6795, 2008.
- [79] L. Hines, K. Petersen, G. Z. Lum, and M. Sitti, “Soft Actuators for Small-Scale Robotics,” Adv. Mater., Vol.29, No.13, 2017.
- [80] R. L. Truby and J. A. Lewis, “Printing soft matter in three dimensions,” Nature, Vol.540, No.7633, pp. 371-378, 2016.
- [81] T. J. Wallin, J. Pikul, and R. F. Shepherd, “3D printing of soft robotic systems,” Nature Reviews Materials, Vol.3, No.6, pp. 84-100, 2018.
- [82] R. T. Shafranek, S. C. Millik, P. T. Smith, C.-U. Lee, A. J. Boydston, and A. Nelson, “Stimuli-responsive materials in additive manufacturing,” Progress in Polymer Science, Vol.93, pp. 36-67, 2019.
- [83] T. Takuma and K. Hosoda, “Controlling the Walking Period of a Pneumatic Muscle Walker,” The Int. J. of Robotics Research, Vol.25, No.9, pp. 861-866, 2016.
- [84] A. Rosendo, S. Nakatsu, K. Narioka, and K. Hosoda, “Producing alternating gait on uncoupled feline hindlimbs: muscular unloading rule on a biomimetic robot,” Advanced Robotics, Vol.28, No.6, pp. 351-365, 2014.
- [85] T. Tanikawa, Y. Masuda, and M. Ishikawa, “A Reciprocal Excitatory Reflex Between Extensors Reproduces the Prolongation of Stance Phase in Walking Cats: Analysis on a Robotic Platform,” Front Neurorobot, Vol.15, Article No.636864, 2021.
- [86] M. H. Raibert, “Legged robots,” Communications of the ACM, Vol.29, No.6, pp. 499-514, 1986.
- [87] G. Zhao, F. Szymanski, and A. Seyfarth, “Bio-inspired neuromuscular reflex based hopping controller for a segmented robotic leg,” Bioinspir. Biomim., Vol.15, No.2, Article No.026007, 2020.
- [88] X. Liu, A. Rosendo, S. Ikemoto, M. Shimizu, and K. Hosoda, “Robotic investigation on effect of stretch reflex and crossed inhibitory response on bipedal hopping,” J. R. Soc. Interface, Vol.15, No.140, 2018.
- [89] D. Owaki and A. Ishiguro, “A Quadruped Robot Exhibiting Spontaneous Gait Transitions from Walking to Trotting to Galloping,” Sci. Rep., Vol.7, No.1, Article No.277, 2017.
- [90] G. Tanaka, T. Yamane, J. B. Héroux, R. Nakane, N. Kanazawa, S. Takeda, H. Numata, D. Nakano, and A. Hirose, “Recent advances in physical reservoir computing: A review,” Neural Networks, Vol.115, pp. 100-123, 2019.
- [91] E. R. Kandel, J. H. Schwartz, and T. M. Jessell, “Principles of neural science,” 4th edition, McGraw-hill, 2000.
- [92] P. Whelan, G. Hiebert, and K. Pearson, “Stimulation of the group I extensor afferents prolongs the stance phase in walking cats,” Experimental Brain Research, Vol.103, No.1, pp. 20-30, 1995.
- [93] D. A. McVea, J. M. Donelan, A. Tachibana, and K. G. Pearson, “A role for hip position in initiating the swing-to-stance transition in walking cats,” J. of Neurophysiology, Vol.94, No.5, pp. 3497-3508, 2005.
- [94] H. Forssberg, “Stumbling corrective reaction: a phase-dependent compensatory reaction during locomotion,” J. of Neurophysiology, Vol.42, No.4, pp. 936-953, 1979.
- [95] C. Marsden, P. Merton, and H. Morton, “Human postural responses,” Brain, Vol.104, No.3, pp. 513-534, 1981.
- [96] A. Prochazka, M. Hulliger, P. Trend, and N. Dürmüller, “Dynamic and static fusimotor set in various behavioural contexts,” P. Hník, T. Soukup, R. Vejsada, and J. Zelená (Eds.), “Mechanoreceptors,” pp. 417-430, Springer, 1988.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.