Paper:
Development of an Underwater Robot for Detecting Shallow Water in a Port
Ririka Itoh and Tadatsugi Okazaki
Tokyo University of Marine Science and Technology
2-1-6 Etchujima, Koto-ku, Tokyo 135-8533, Japan

Water depth is an important piece of information for the ship navigator when entering the port. However, the depth is not always accurate as indicated in the chart due to tides and sedimentation. This study aimed to develop an underwater robot to easily measure water depth. To measure the water depth at the place where the ship is moored at the quay, this paper proposed the method of measuring the water depth by submerging an underwater robot under the moored ship. Actual sea area experiments indicated the effectiveness of the underwater robot.
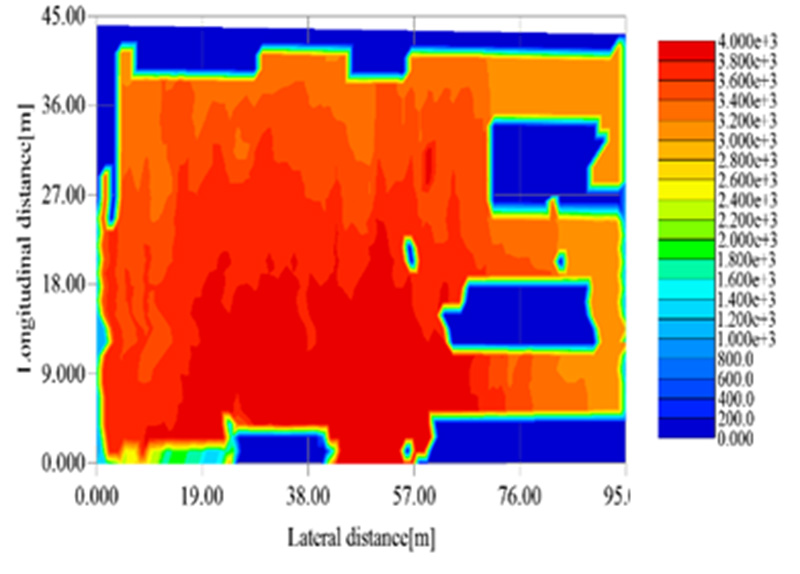
Water depth map of mooring station measured by the underwater robot
- [1] T. Okazaki, “A Study on Evaluating Maneuvering skill and Developing Support Tool for Marine Pilot Trainees Berthing a Ship,” Proc. of 2010 IEEE Int. Conf. on System, Man and Cybernetics, pp. 3087-3093, 2010.
- [2] Ports and Harbor Bureau, Ministry of Land Infrastructure and Transport and Tourism (MLIT), “Technical Standards and Commentaries for Port and Harbour Facilities in Japant,” The Overseas Coastal Area Development Institute of Japan, 2009.
- [3] E. M. Galal, N. S. Halabia, and E. R. Tolba, “The Effect Of Sea Side Quay Wall Roughness And Inclination On Bed Scour Induced By Ship Bow-Thrusters,” Malaysian J. of Civil Engineering, Vol.28, No.2, pp. 205-217, 2016.
- [4] T. A. Kearns and J. Breman, “Bathymetry – the art and science of seafloor modeling for modern applications,” Ocean Globe, pp. 1-36, 2010.
- [5] M. Kurowski et al., “Automated Survey in Very Shallow Water using an Unmanned Surface Vehicle,” IFAC-PapersOnLine, Vol.52, No.21, pp. 146-151, 2019.
- [6] R. Itoh and T. Okazaki, “Fundamental Study on Ship Maneuvering Support using Underwater Robot,” Proc. of Conf. on System Integration 2019, pp. 214-219, 2019.
- [7] T. Naruse, “Development of Bottom-Reliant Type Underwater Robots,” J. Robot. Mechatron., Vol.26, No.3, pp. 279-286, 2014.
- [8] Y. Nagashima, N. Taguchi, T. Ishimatsu, and H. Inoue, “Development of a Compact Autonomous Underwater vehicle Using Varivec Propeller,” J. Robot. Mechatron., Vol.14, No.2, pp. 112-117, 2002.
- [9] T. Ura, “Development Timeline of the Autonomous Underwater Vehicle in Japan,” J. Robot. Mechatron., Vol.32, No.4, pp. 713-721, 2020.
- [10] V. Kumar and K. P. S. Rana, “Some investigations on hybrid fuzzy IPD controllers for proportional and derivative kick suppression,” Int. J. Autom. Comput., Vol.13, pp. 516-528, 2016.
- [11] M. V. Kothare, P. J. Campo, M. Morari, and C. N. Nett, “A Unified Framework for the Study of Anti-Windup Designs,” Automatica, Vol.30, Issue 12, pp. 1869-1883, 1994.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.