Development Report:
A Balance Control for the Miniature Motorcycle Robot with Inertial Rotor and Steering
Nobuyasu Tomokuni
Kindai University
1 Takaya Umenobe, Higashi-Hiroshima, Hiroshima 739-2116, Japan

This paper presents a miniature motorcycle robot developed for the purpose of research on attitude control at the time of traveling and resting a motorcycle mobile body. The miniaturization has been achieved by developing a small board using MPU and FPGA as a controller. This motorcycle mobile robot has a mechanism featuring the use of an inertial rotor in addition to the steering mechanism of a common motorcycle. The use of the inertial rotor enables the balance to be maintained even at the time of rest. Using this function of being able to maintain balance even at the time of resting, we measured the effect of a steering operation on balance and successfully compared it with the theory. Furthermore, balanced traveling is achieved by using only an inertial rotor at a low speed and only steering at high speed.
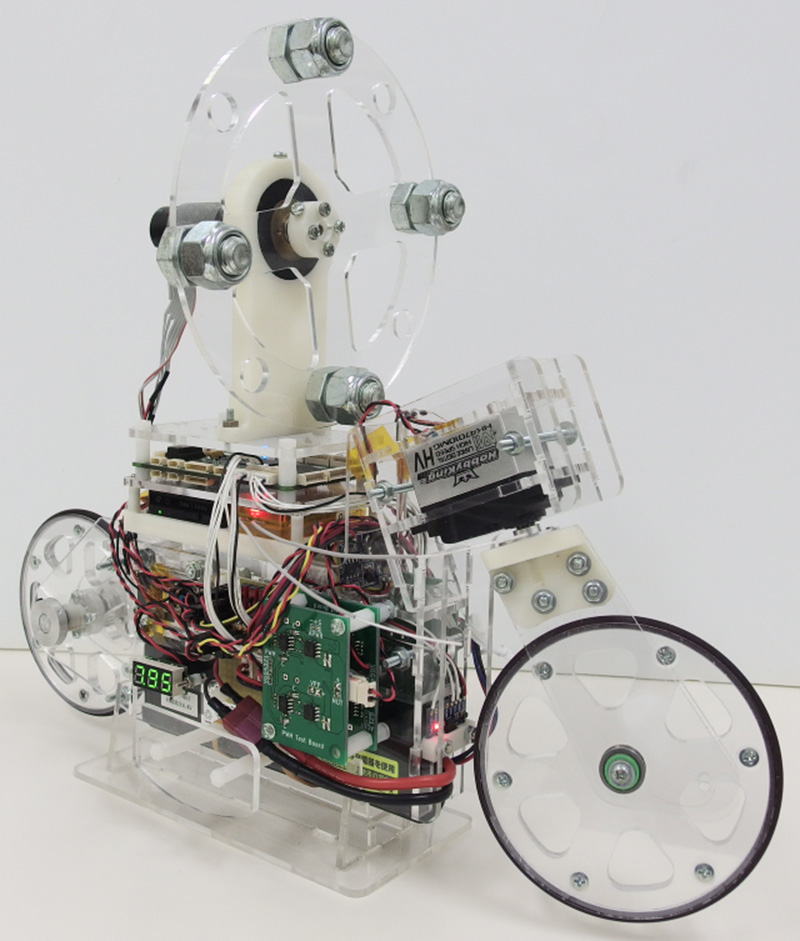
Miniature motorcycle robot
- [1] A. Doria et al., “Identification of the mechanical properties of bicycle tires for modelling of bicycle dynamics,” Vehicle System Dynamics, Vol.51, No.3, pp. 405-420, 2013.
- [2] J. Yi, D. Song, A. Levandowski, and S. Jayasuriya, “Trajectory tracking and balance stabilization control of autonomous motorcycles,” Proc. of 2006 IEEE Int. Conf. on Robotics and Automation, pp. 2583-2589, 2006.
- [3] H. Baaz, “Navigation and planned movement of an unmanned bicycle,” Dissertation, Mälardalen University, 2020.
- [4] D. Todeschini, G. Panzani, M. Tanelli, D. Sette, and S. M. Savaresi, “Experimental gyroscopic stabilization of motorcycles: a 3rd order sliding mode approach,” Proc. of 2020 IEEE 23rd Int. Conf. on Intelligent Transportation Systems (ITSC), pp. 1-6, 2020.
- [5] N. Gustavo et al., “Fractional PIλ (PDμ) controller design for a cmg stabilizing system for two-wheeled vehicle,” Proc. of the 24th ABCM Int. Congress of Mechanical Engineering, doi: 10.26678/ABCM.COBEM2017.COB17-2772, 2017.
- [6] Z. Wang et al., “Development of a Two-Wheel Steering Unmanned Bicycle: Simulation and Experimental Study,” Proc. of 2020 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 119-124, 2020.
- [7] P. Seekhao et al., “Development and control of a bicycle robot based on steering and pendulum balancing,” Mechatronics, Vol.69, 102386, 2020.
- [8] N. Tomokuni, “A Development of Small-sized Realtime Controller with MCU and FPGA,” Proc. of JSME Annual Conf. on Robotics and Mechatronics 2017 (Robomec 2017), 1P1-C01, 2017 (in Japanease).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.