Paper:
Measurements and Analyses of Walk Using a Novel Rollator Equipped with a Rotatable Chest Pad
Jian Huang*1, Hiroaki Ashida*2, Yuetong He*3, Noriho Koyachi*1, and Takashi Harada*4
*1Faculty of Engineering, Kindai University
1 Takaya Umenobe, Higashi-Hiroshima, Hiroshima 739-2116, Japan
*2Choshu Industry Co., Ltd.
3740 Shin-yamanoi, Sanyo-onoda, Yamaguchi 757-8511, Japan
*3Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan
*4Faculty of Science and Engineering, Kindai University
3-4-1 Kowakae, Higashiosaka, Osaka 577-8502, Japan

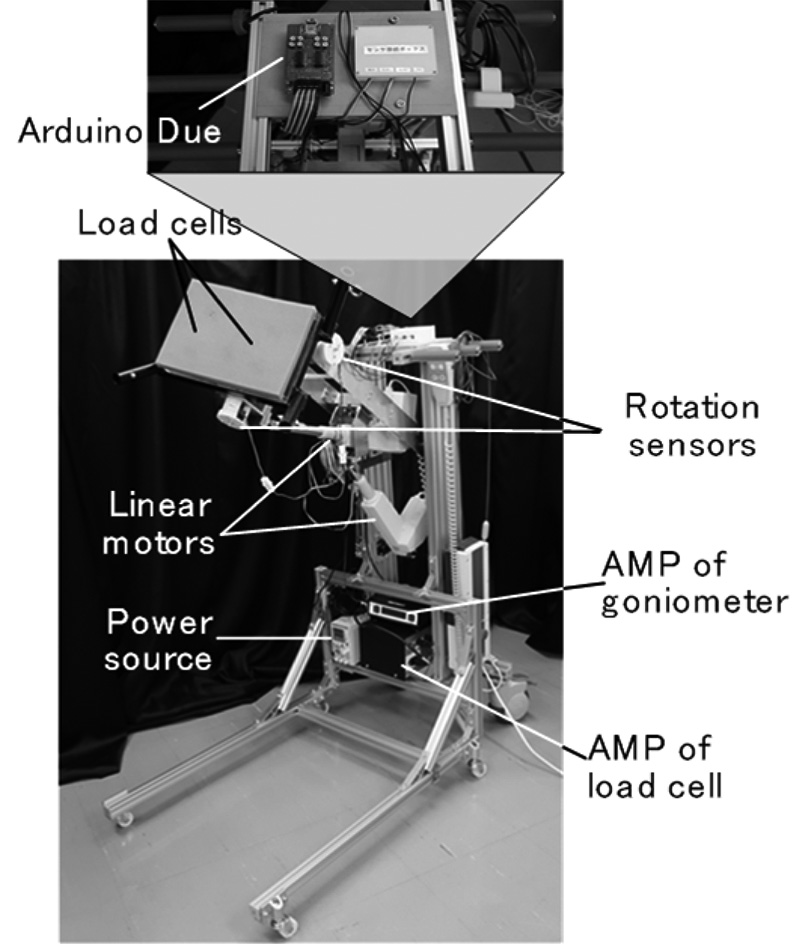
In recent years, different types of commercial rollators or gait-training devices have been widely used by elderly people, suffering from dementia, for their daily activities to avoid being bedridden. However, the effectiveness of most of these commercial devices has not been investigated thoroughly. In this study, a novel rollator with a freely rotating chest pad, integrated with two angular sensors and two load cells, was developed. Walk measurements were carried out on four young healthy subjects who performed walk tests using the developed rollator. To measure the motion of the lower limbs, two goniometers were attached to the exteriors of both the knees, and two more were attached to the exteriors of both the ankle joints of the subjects. The results of the pressing forces on the pad measured by the load cells, pad rotations, knee extensions, and ankle rotations were demonstrated. Frequency analyses were performed and correlation coefficients were computed for the obtained results. The relationship between the pad rotation and the motion of the lower limbs was investigated, and the effectiveness of the developed novel rollator in walk assistance was discussed.
A rollator with a rotatable chest pad
- [1] Ministry of Internal Affairs and Communications (MIC), “Information and Communications in Japan 2013,” White Paper, 2013.
- [2] T. Hayashi, H. Kawamoto, and Y. Sankai, “Control method of robot suit HAL working as operator’s muscle using biological and dynamical information,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3063-3068, 2005.
- [3] A. Watanabe, K. Kawai, K. Sato, Y. Miyazaki, H. Ito, and T. Mori, “Gait changes brought about by continued use of Honda’s stride management assist in patients with stoke-related hemiplegia,” J. of Japanese Physical Therapy Association, Vol.43, No.4, pp. 337-341, 2016.
- [4] Y. Shimizu, T. Suzuki, E. Saitoh, Y. Muraoka, S. Tanabe, T. Takemitsu, A. Uno, M. Katoh, and M. Ozeki, “A Preliminary Report about a new Robot WPAL (Wearable Power-Assist Locomotor) for Paraplegic Gait Reconstruction,” Japanese J. of Rehabilitation Medicine, Vol.46, No.8, pp. 527-533, 2009.
- [5] J. Inoue, I. Hanazaki, K. Kawamura, Y. Kijima, and T. Fujimoto, “Developing Walker which Use for Crutch Walking Exercises for Hemiplegia without Watching,” IEEJ Trans. on Electronics, Information and Systems, Vol.137, No.3, pp. 452-458, 2017.
- [6] R. Han, C. Tao, J. Huang, Y. Wang, H. Yan, and L. Ma, “Design and control of an intelligent walking-aid robot,” Proc. of Int. Conf. of Modeling, Identification Control, pp. 53-58, 2014.
- [7] T. Fukuda, J. Huang, D. Pei, and K. Sekiyama, “Motion control and fall detection of intelligent cane robot,” S. Mohammed, J. Moreno, K. Kong, and Y. Amirat (Eds.), “Intelligent Assistive Robots,” Springer Tracts in Advanced Robotics, Vol.106, pp. 317-337, 2015.
- [8] Q. Yan, J. Huang, C. Xiong, Z. Yang, and Z. Yang, “Data-driven human-robot coordination based walking state monitoring with cane-type robot,” IEEE Access, Vol.6, pp. 8896-8908, doi: 10.1109/ACCESS.2018.2806563, 2018.
- [9] J. Solis, D. T. Teshome, and J. P. De la Rosa, “Towards the development of multipurpose assistive vehicle robot for the ambient assisted living,” Proc. of Int. Conf. on Automation Science and Engineering, pp. 1145-1150, 2015.
- [10] J. Solis, “Development of a human-friendly walking assisting robot vehicle designed to provide physical support to the elderly,” IFAC-PapersOnLine, Vol.49, Issue 21, pp. 656-661, 2016.
- [11] X. Zhao, Z. Zhu, M. Liu, C. Zhao, Y. Zhao, J. Pan, Z. Wang, and C. Wu, “A Smart Robotic Walker With Intelligent Close-Proximity Interaction Capabilities for Elderly Mobility Safety,” Front. Neurorobot., Vol.14, 575889, doi: 10.3389/fnbot.2020.575889, 2020.
- [12] M. Fujie, “Walk Support Robot,” J. of the Robotics Society of Japan, Vol.14, No.5, pp. 628-631, 1996.
- [13] S. Hirano, E. Saitoh, S. Sonoda, K. Otsuka, N. Itoh, M. Kato, S. Tanabe, H. Konosu, A. Uno, and T. Takemitsu, “Development of rehabilitation robots,” Bulletin of the Japanese Society of Prosthetic and Orthotics, Vol.29, No.2, pp. 90-97, 2013 (in Japanese).
- [14] T. Tono, M. Watanabe, and M. Fujie, “Development of control algorithm for synchronously pelvic assist during gait,” Proc. of Conf. Welfare, Wellbeing, Life Support, pp. 532-535, 2010.
- [15] Y. Tsusaka, F. Dallalibera, Y. Okazaki, M. Yamamoto, and Y. Yokokohji, “Development of a standing-up motion assist robot considering physiotherapist skills that bring out abilities from the patient,” Trans. of the JSME, Vol.83, No.852, 17-00058, doi: 10.1299/transjsme.17-00058, 2017.
- [16] J. Huang, N. Koyachi, and N. Miyano, “Evaluation of a Walking Assistant Rollator Integrated with a Rotating Chest Support Mechanism,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2P1-J05, 2015.
- [17] J. Huang, N. Koyachi, and N. Miyano, “Evaluating the Assistant Effectiveness of a Walking Rollator Equipped with a Free Rotating Chest Support Mechanism,” Proc. of u-Healthcare 2015, S3-2-4, 2015.
- [18] J. Huang and N. Koyachi, “Evaluation of the Stimulatory Effectiveness of a Rollator Integrated with an Uncontrolled Rotating Chest Pad,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2A2-02A3, 2016.
- [19] J. Huang and N. Koyachi, “Evaluating the Assistance Effectiveness of a Newly Developed Rollator Mounted with a Freely Rotating Chest Support Pad,” Proc. of 2016 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1185-1190, 2016.
- [20] J. Huang and N. Koyachi, “Measurements of Walking Using a Newly Developed Rollator Having an Free Rotating Chest Pad Integrated with Multiple Sensors,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2P1-P10, 2017.
- [21] J. Huang and N. Koyachi, “Evaluating the Assistance Effectiveness of a Newly Developed Rollator Mounted with a Freely Rotating Chest Support Pad,” Proc. of 2017 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1185-1190, 2017.
- [22] J. Huang and N. Koyachi, “Measurements of Walk Using a Rollator Having a Free Rotating Chest Pad,” Proc. of JSME Conf. on Robotics and Mechatoronics, 2A1-E05, 2018.
- [23] J. Huang, H. Ashida, N. Koyachi, and T. Harada, “Walk Measurements Using a Novel Rollator with a Free Rotating Chest Pad and an Analysis of its Effectiveness in Walk Assistance,” Proc. of IEEE the 5th Int. Conf. on Mechatronics System and Robots, pp. 13-17, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.