Paper:
Spread Spectrum Sound with TDMA and INS Hybrid Navigation System for Indoor Environment
Romprakhun Tientadakul*, Hiroaki Nakanishi*, Tomoo Shiigi**, Zichen Huang***, Lok Wai Jacky Tsay***, and Naoshi Kondo***
*Graduate School of Engineering, Kyoto University
Kyoto daigaku-katsura, Nishikyo-ku, Kyoto 615-8540, Japan
**Department of Ocean Mechanical Engineering, National Fisheries University
2-7-1 Nagata-Honmachi, Shimonoseki, Yamaguchi 759-6595, Japan
***Graduate School of Agriculture, Kyoto University
Kitashirakawa-Oiwakecho, Sakyo-ku, Kyoto 606-8502, Japan

Indoor navigation plays an essential role in agricultural robots that operate in greenhouses. One of the most effective methods for indoor navigation is the spread spectrum sound (SS-sound) system. In this system, the time of arrival (ToA) of the spread spectrum modulated sound is used for localization. However, there is a near-far problem. Transmitting the SS-sound from multiple anchors using time division multiple access (TDMA) is adequate to solve the near-far problem. However, localization is impossible because the ToA from multiple anchors cannot be simultaneously acquired. To solve this problem, a method for combining the SS-sound system with TDMA and an inertial navigation system is proposed in this study. The effectiveness of the proposed method was demonstrated through numerical simulations of a ground robot and experimentally using a crawler robot.
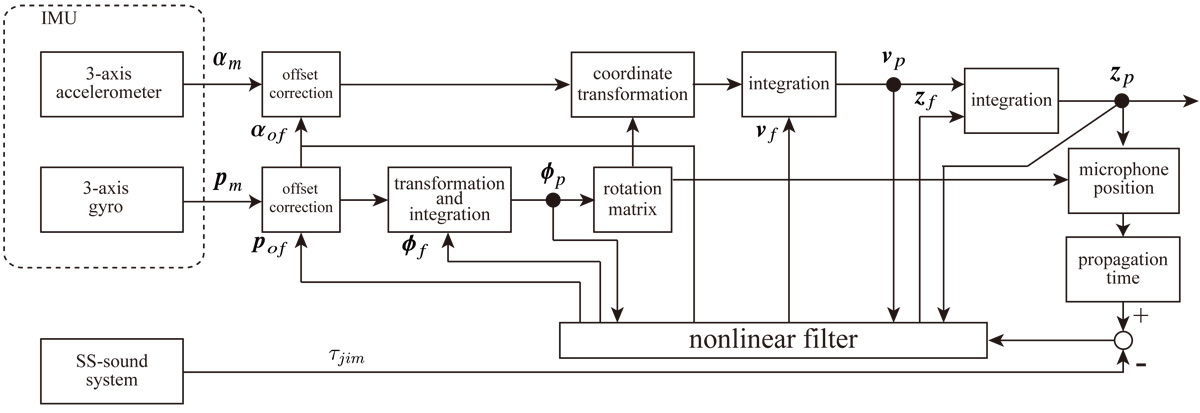
SS-sound and INS hybrid navigation system
- [1] O. Elijah, T. A. Rahman, I. Orikumhi, C. Y. Leow, and M. N. Hindia, “An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges,” IEEE Internet of Things J., Vol.5, No.5, pp. 3758-3773, 2018.
- [2] L. Girod, “Development and characterization of an acoustic rangefinder,” Department of Computer Science, University of Southern California, TR-00-728, 2000.
- [3] Y. Itagaki, A. Suzuki, and T. Iyota, “Indoor positioning for moving objects using a hardware device with spread spectrum ultra-sonic waves,” Proc. of the 2012 Int. Conf. on Indoor Positioning and Indoor Navigation, 2012.
- [4] S. K. Khangura, K. Kaur, and R. Uppal, “Power Control Algorithms in Wireless Communication,” Int. J. of Computer Applications, Vol.1, No.12, pp. 64-69, 2010.
- [5] R. Tientadakul, H. Nakanishi, T. Shiigi, Z. Huang, L. W. J. Tsay, and N. Kondo, “Indoor Navigation System by Combining Ultrasonic Wave TOA and Inertial Measurement,” Proc. of the 2020 59th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 1690-1695, doi: 10.23919/SICE48898.2020.9240233, 2020.
- [6] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2015.
- [7] H. Nakanishi and H. Hashimoto, “AR-Marker/IMU Hybrid Navigation System for Tether-Powered UAV,” J. Robot. Mechatron., Vol.29, No.1, pp. 76-85, doi: 10.20965/jrm.2018.p0076, 2018.
- [8] R. M. Rogers, “Applied Mathematics in Integrated Navigation Systems,” AIAA Education Series, 2000.
- [9] D. H. Tutterton and J. L. Weston, “Strapdown Inertial Navigation Technology (2nd Ed.),” AIAA, 2004.
- [10] Z. Huang, L. W. J. Tsay, T. Shiigi, X. Zhao, H. Nakanishi, T. Suzuki, Y. Ogawa, and N. Kondo, “A Noise Tolerant Spread Spectrum Sound-Based Local Positioning System for Operating a Quadcopter in a Greenhouse,” Sensors, Vol.20, No.7, 1981, 2020.
- [11] C. Tu, K.-Y. Tu, F. Chang, and L. Wang, “GPS compass: novel navigation equipment,” IEEE Trans. on Aerospace and Electronic Systems, Vol.33, No.3, pp. 1063-1068, July 1997.
- [12] G. Welch and G. Bishop, “SCAAT: incremental tracking with incomplete information,” Proc. of the 24th Annual Conf. on Computer Graphics and Interactive Techniques, pp. 333-344, 1997.
- [13] B. Etkin, “Dynamics of Atmospheric Flight,” John Wiley & Sons Inc., 1972.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.