Paper:
Numerical and Experimental Analysis of Portable Underwater Robots with a Movable Float Device
Norimitsu Sakagami*, Mizuho Shibata**, Tomohiro Ueda***, Kensei Ishizu***, Kenshiro Yokoi***, and Sadao Kawamura***
*Tokai University
3-20-1 Orido, Shimizu-ku, Shizuoka, Shizuoka 424-0902, Japan
**Kindai University
1-1 Takaya Umenobe, Higashi-hiroshima, Hiroshima 739-2116, Japan
***Ritsumeikan University
1-1-1 Nojihigashi, Kusatsu, Shiga 525-8577, Japan

This report describes a numerical and experimental study of a posture control device based on a movable float for portable underwater robots. We numerically analyzed the static stability using a stability curve and allowable spatial range of a center-of-gravity shift caused by a payload shift or manipulator configuration. Further, we proposed a feedback controller based on direct pitch and roll signals to change and maintain robot posture. We tested the feedback control using a numerical simulator and conducted experiments in a water tank using two portable underwater robots to demonstrate the effectiveness of the movable float device and proposed controller. The results of the field experiments showed that the device and proposed controller can be employed for effective underwater operations of portable underwater robots.
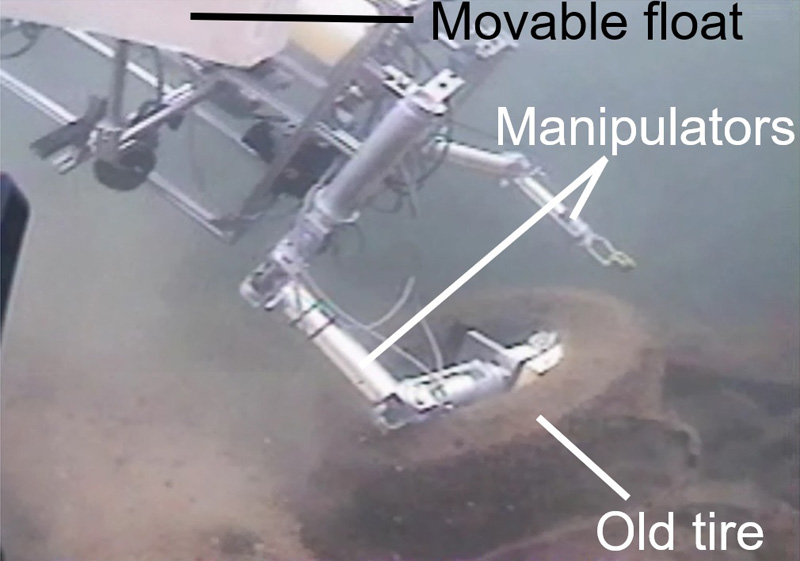
Human-sized underwater robot in Lake Biwa
- [1] N. Sakagami, T. Kanayama, T. Ueda, H. Hashizume, M. Shibata, H. Onishi, S. Murakami, and S. Kawamura, “Design and Development of An Attitude Control System for a Human-sized ROV,” Proc. of Int. Conf. on Control, Automation, Robotics and Vision, pp. 2141-2146, doi: 10.1109/ICARCV.2010.5707896, 2010.
- [2] N. Sakagami, M. Shibata, S. Kawamura, T. Inoue, H. Onishi, and S. Murakami, “An Attitude Control System for Underwater Vehicle-Manipulator Systems,” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1761-1767, doi: 10.1109/ROBOT.2010.5509800, 2010.
- [3] N. Sakagami, T. Ueda, M. Shibata, and S. Kawamura, “Pitch and Roll Control Using Independent Movable Floats for Small Underwater Robots,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4756-4761, doi: 10.1109/IROS.2011.6095050, 2011.
- [4] N. Sakagami, K. Ishimaru, S. Kawamura, M. Shibata, H. Onishi, and S. Murakami, “Development of an Underwater Robotic Inspection System using Mechanical Contact,” J. Field Robotics, Vol.30, Issue 4, pp. 624-640, doi: 10.1002/rob.21463, 2013.
- [5] K. Yokoi, M. Kawabata, S. Sakai, S. Kawamura, N. Sakagami, S. Matsuda, A. Mitsui, and K. Sano, “Improvement of a Human-portable Underwater Robot for Soil Core Sampling,” Proc. of OCEANS MTS/IEEE 2014, 40326-18, doi: 10.1109/OCEANS.2014.7003156, 2014.
- [6] T. Yoshikawa, “Manipulability of Robotic Mechanisms,” Int. J. Robotics Research, Vol.4, Issue 2, pp. 3-9, doi: 10.1177/027836498500400201, 1985.
- [7] M. Matsushima and Y. Nakabayashi, “Underwater Vehicle RTV.N-100EXY,” Proc. of SICE System Integration Division Annual Conf., 1A3-5, 2008 (in Japanese).
- [8] T. W. McLain, S. M. Rock, and M. J. Lee, “Experiments in the Coordinated Control of an Underwater Arm/Vehicle System,” Autonomous Robots, Vol.3, Issue 2, pp. 213-232, doi: 10.1007/BF00141156, 1996.
- [9] M. Doniec, I. Vasilescu, C. Detweiler, and D. Rus, “Complete SE3 Underwater Robot Control with Arbitrary Thruster Configurations,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 5295-5301, doi: 10.1109/ROBOT.2010.5509538, 2010.
- [10] S. Chao, G. Guan, and G. Hong, “Design of a Finless Torpedo Shaped Micro AUV with High Maneuverability,” Proc. of OCEANS MTS/IEEE, pp. 1-6, 2017.
- [11] K. Li, X. Wang, W. Zou, Q. Zou, and C. Li, “Design of an autonomous underwater vehicle robot based on multi-thrusters and attitude fusion,” Proc. of IEEE Int. Conf. on Information and Automation, pp. 1420-1425, doi: 10.1109/ICInfA.2016.7832042, 2016.
- [12] H. Liu and Z. Gong, “Disturbance Fuzzy Approach based Sliding Mode Control on the Working Attitude Adjusting Device of ROV,” Int. Asia Conf. on Informatics in Control, Automation and Robotics, pp. 235-239, doi: 10.1109/CAR.2009.60, 2009.
- [13] C. C. Eriksen, T. J. Osse, R. D. Light, T. Wen, T. W. Lehman, P. L. Sabin, J. W. Ballard, and A. M. Chiodi, “Seaglider: A Long-Range Autonomous Underwater Vehicle for Oceanographic Research,” IEEE J. Oceanic Engineering, Vol.26, Issue 4, pp. 424-436, doi: 10.1109/48.972073, 2001.
- [14] J. Sherman, R. E. Davis, W. B. Owens, and J. Valdes, “The Autonomous Underwater Glider “Spray”,” IEEE J. Oceanic Engineering, Vol.26, Issue 4, pp. 437-446, doi: 10.1109/48.972076, 2001.
- [15] D. C. Webb, P. J. Simonetti, and C. P. Jones, “SLOCUM: An Underwater Glider Propelled by Environmental Energy,” IEEE J. Oceanic Engineering, Vol.26, Issue 4, pp. 447-452, doi: 10.1109/48.972077, 2001.
- [16] M. Nakamura, W. Koterayama, M. Inada, K. Marubayashi, T. Hyodo, H. Yoshimura, and Y. Morii, “Disk-type Underwater Glider for Virtual Mooring and Field Experiment,” Int. J. Offshore and Polar Engineering, Vol.19, Issue 1, pp. 66-70, 2009.
- [17] S. A. Woods, R. J. Bauer, and M. L. Seto, “Automated Ballast Tank Control System for Autonomous Underwater Vehicles,” IEEE J. Oceanic Engineering, Vol.37, Issue 4, pp. 727-739, doi: 10.1109/JOE.2012.2205313, 2012.
- [18] G. Barbera, L. Pi, and X. Deng, “Attitude Control for a Pectoral Fin Actuated Bio-inspired Robotic Fish,” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 526-531, doi: 10.1109/ICRA.2011.5980481, 2011.
- [19] T. Salumäe, A. Chemori, and M. Kruusmaa, “Motion Control of a Hovering Biomimetic Four-Fin Underwater Robot,” IEEE J. Oceanic Engineering, pp. 1-18, doi: 10.1109/JOE.2017.2774318, 2017.
- [20] B. Thornton, T. Ura, Y. Nose, and S. Turnock, “Zero-G Class Underwater Robots: Unrestricted Attitude Control Using Control Moment Gyros,” IEEE J. Oceanic Engineering, Vol.32, Issue 3, pp. 565-583, doi: 10.1109/OCEANSAP.2006.4393842, 2007.
- [21] L. K. Kobylinski and S. Kastner, “Stability And Safety of Ships, Volume I: Regulation and Operation,” Elsevier, 2003.
- [22] T. I. Fossen, “Guidance and Control of Ocean Vehicles,” John Wiley and Sons, 1994.
- [23] K. Ioi and K. Itoh, “Modelling and Simulation of an Underwater Manipulator,” Advanced Robotics, Vol.4, Issue 4, pp. 303-317, doi: 10.1163/156855390X00152, 1989.
- [24] G. Antonelli, “Underwater Robots: Motion and Force Control of Vehicle-Manipulator Systems,” Springer-Verlag, doi: 10.1007/11540199, 2003.
- [25] F. Takemura, S. Futenma, K. Kawabata, and S. Sagara, “Experimental Verification of Lifting Force of Underwater Robot with Thrusters Using Passive Posture Maintenance,” J. Robot. Mechatron., Vol.25, No.5, pp. 812-819, doi: 10.20965/jrm.2013.p0812, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.