Paper:
Local Peak Method: An Electrotactile Stimulation Method Focusing on Surface Structures for Texture Rendering
Akimu Hirai*, Masaya Nakayama**, and Takefumi Ogawa**
*Graduate School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
**Information Technology Center, The University of Tokyo
6-2-3 Kashiwanoha, Kashiwa-shi, Chiba 277-0882, Japan

Presenting objects’ texture sensations by electrical stimulation has been drawing greater attention as a means to improve the augmented reality experiences. To reproduce the texture sensations of real objects in detail, tactile perceptions of their complex surface shapes must be translated as electrical stimulation. Many conventional studies on presenting vibrational sensations by electrical stimulations have used single pulse waveforms, limiting the vibrational sensations that can be presented by electrical stimulations. In this paper, therefore, we propose the local peak method, in which pulse waveforms are configured on the objects’ surface structures. We have experimentally proved that the proposed local peak method can present sensations that are more akin to touching physical objects than pulse waveforms of single intervals in the case of presented objects having complex surface structures.
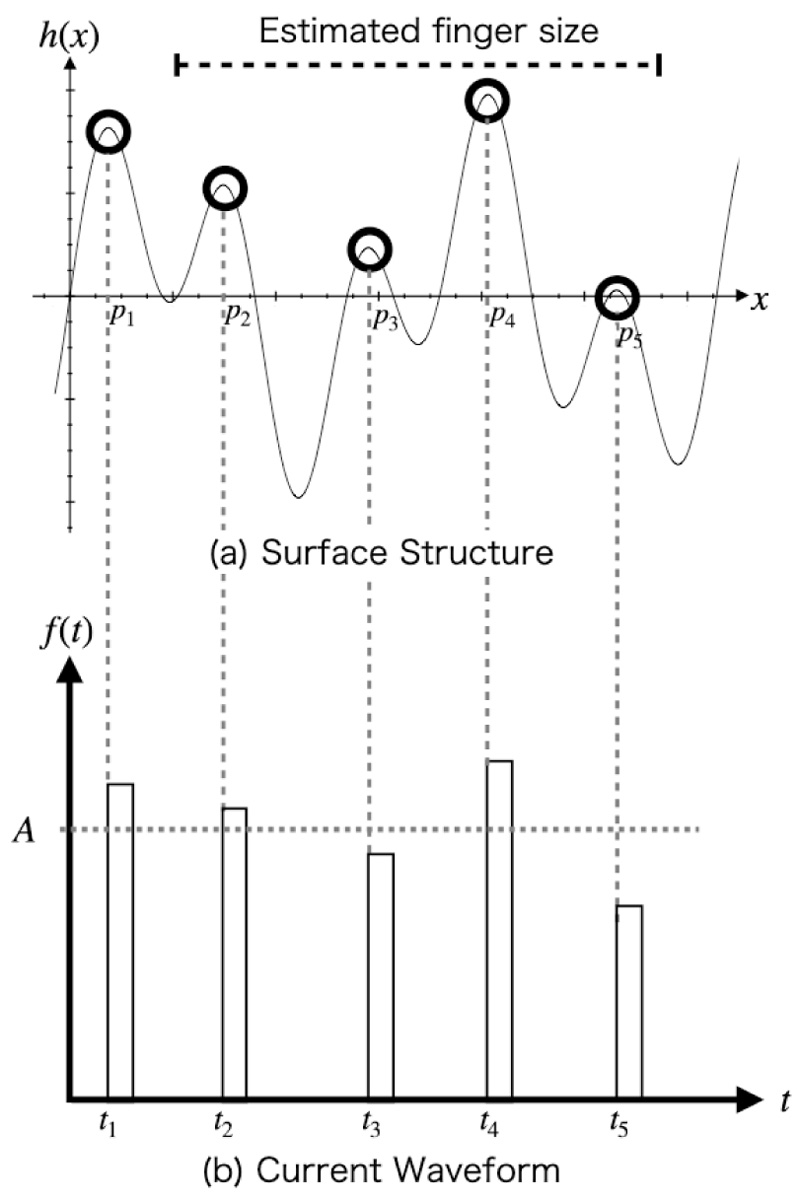
Current waveforms by local peak method
- [1] M. Maisto, C. Pacchierotti, F. Chinello, G. Salvietti, A. De Luca, and D. Prattichizzo, “Evaluation of Wearable Haptic Systems for the Fingers in Augmented Reality Applications,” IEEE Trans. on Haptics, Vol.10, No.4, pp. 511-522, 2017.
- [2] M. R. Motamedi, D. Florant, and V. Duchaine, “A Wearable Haptic Device Based on Twisting Wire Actuators for Feedback of Tactile Pressure Information,” J. Robot. Mechatron., Vol.27, No.4, pp. 419-429, 2015.
- [3] H. Kajimoto, N. Kawakami, S. Tachi, and M. Inami, “SmartTouch: electric skin to touch the untouchable,” IEEE Computer Graphics and Applications, Vol.24, No.1, pp. 36-43, 2004.
- [4] H. Kajimoto, “Skeletouch: Transparent Electro-Tactile Display for Mobile Surfaces,” Proc. SIGGRAPH Asia 2012 Emerging Technologies (SA ’12), New York, NY, USA, pp. 1-3, 2012.
- [5] S. Yoshimoto, Y. Kuroda, M. Imura, and O. Oshiro, “Development of a spatially transparent electrotactile display and its performance in grip force control,” Proc. 2011 Annual Int. Conf. of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, pp. 3463-3466, 2011.
- [6] S. Yoshimoto, Y. Kuroda, M. Imura, and O. Oshiro, “Material Roughness Modulation via Electrotactile Augmentation,” IEEE Trans. on Haptics, Vol.8, No.2, pp. 199-208, 2015.
- [7] K. Kato, H. Ishizuka, H. Kajimoto, and H. Miyashita, “Double-sided Printed Tactile Display with Electro Stimuli and Electrostatic Forces and Its Assessment,” Proc. 2018 CHI Conf. on Human Factors in Computing Systems (CHI ’18), New York, NY, USA, 450, 2018.
- [8] V. Yem and H. Kajimoto, “Wearable tactile device using mechanical and electrical stimulation for fingertip interaction with virtual world,” Proc. 2017 IEEE Virtual Reality (VR), Los Angeles, CA, USA, pp. 99-104, 2017.
- [9] A. Hirai, M. Nakayama, and T. Ogawa, “A proposal and evaluation of electrotactile stimulation method using multiple pulse waveforms,” Proc. Multimedia, Distributed, Cooperative, and Mobile Symp., pp. 1561-1568, Online, 2020.
- [10] A. Hirai, M. Nakayama, and T. Ogawa, “A study of Electrotactile Stimulation Method Focusing on Surface Structures for Texture Rendering,” VRSJ Research Report, 25(HAP02), pp. 19-22, 2020.
- [11] S. Yoshimoto, Y. Kuroda, Y. Kagiyama, T. Kuroda, and O. Oshiro, “Tactile mapping approach using electrical stimulus pattern,” Proc. of the 18th IEEE Int. Symp. on Robot and Human Interactive Communication (RO-MAN 2009), pp. 460-465, 2009.
- [12] M. Germani, M. Mengoni, and M. Peruzzini, “Electro-tactile device for material texture simulation,” The Int. J. of Advanced Manufacturing Technology, Vol.68, No.9, pp. 2185-2203, 2013.
- [13] A. Abdulali and S. Jeon, “Data-Driven Modeling of Anisotropic Haptic Textures: Data Segmentation and Interpolation,” Proc. Haptics: Perception, Devices, Control, and Applications, pp. 228-239, London, UK, 2016.
- [14] S. Cho, R. Osgouei, J. R. Kim, and S. Choi, “Data-Driven Texture Modeling and Rendering on Electrovibration Display,” Proc. the 2019 ACM Int. Conf. on Interactive Surfaces and Spaces (ISS ’19), pp. 323-325, New York, NY, USA, 2019.
- [15] H. Culbertson, J. Unwin, and K. J. Kuchenbecker, “Modeling and Rendering Realistic Textures from Unconstrained Tool-Surface Interactions,” IEEE Trans. on Haptics, Vol.7, No.3, pp. 381-393, 2014.
- [16] G. Ilkhani, M. Aziziaghdam, and E. Samur, “Data-Driven Texture Rendering on an Electrostatic Tactile Display,” Int. J. of Human-Computer Interaction, Vol.33, No.9, pp. 756-770, 2017.
- [17] S. Yim, S. Jeon, and S. Choi, “Data-Driven Haptic Modeling and Rendering of Viscoelastic and Frictional Responses of Deformable Objects,” IEEE Trans. on Haptics, Vol.9, No.4, pp. 548-559, 2016.
- [18] K. A. Kaczmarek, M. E. Tyler, U. O. Okpara, and S. J. Haase, “Interaction of Perceived Frequency and Intensity in Fingertip Electrotactile Stimulation: Dissimilarity Ratings and Multidimensional Scaling,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.25, No.11, pp. 2067-2074, 2017.
- [19] C. L. Van Doren, “Contours of equal perceived amplitude and equal perceived frequency for electrocutaneous stimuli,” Perception & Psychophysics, Vol.59, No.4, pp. 613-622, 1997.
- [20] K. A. Kaczmarek and S. J. Haase, “Pattern identification and perceived stimulus quality as a function of stimulation waveform on a fingertip-scanned electrotactile display,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.11, No.1, pp. 9-16, 2003.
- [21] S. Parsnejad, S. Dávila-Montero, and A. J. Mason, “Use of High-Frequency Pulses to Generate Unique Electrotactile Sensations for Real-Time Feedback in Wearable Sensory Systems,” Proc. 2020 IEEE Int. Symp. on Circuits and Systems, pp. 1-5, 2020.
- [22] S. Okamoto, H. Nagano, and Y. Yamada, “Psychophysical Dimensions of Tactile Perception of Textures,” IEEE Trans. on Haptics, Vol.6, No.1, pp. 81-93, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.