Paper:
Gait Rehabilitation System Using a Non-Wearing Type Pneumatic Power Assist Device
Masashi Yokota* and Masahiro Takaiwa**
*Graduate School Advanced Technology and Science, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan
**Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijyousanjima-cho, Tokushima 770-8506, Japan

In Japan, approximately 1.1 million people suffer from cerebrovascular diseases such as cerebral stroke, which can further increase due to the aging society. Therefore, rehabilitation for the physical recovery of patients with hemiplegia caused by cerebrovascular disease plays an important role in maintaining and improving their quality of life (QoL). In rehabilitation facilities, crutches and parallel bars are the mainstream, but patients support their body with their arms, causing falls and fatigue, leading to deterioration of motivation in long-term rehabilitation. Although a few hanging-type devices have been developed to cope with such issues, they occupy large space, require time to wear, and have a high introduction cost. In this study, we developed a non-wearing-type pneumatic power assist device for gait rehabilitation to ensure patients can sustain their body weight by pushing up their armpit and quantitatively verified the effectiveness of the device.
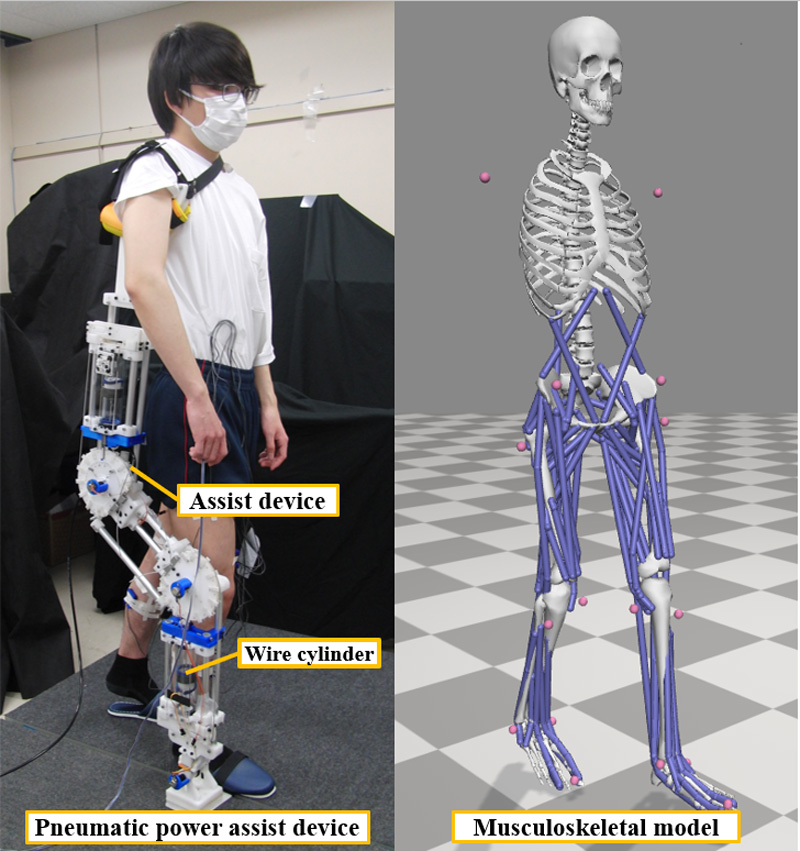
Developed gait rehabilitation system
- [1] Ministry of Health, Labor and Welfare, “Annual Health, Labour and Welfare Report,” 2018 (in Japanese).
- [2] Ministry of Health, Labor and Welfare, “Comprehensive Survey of Living Conditions,” 2019 (in Japanese).
- [3] T. Ando, E. Ohki, Y. Nakashima, Y. Akita, H. Iijima, O. Tanaka, and M. G. Fujie, “Pilot Study of Split Belt Treadmill Based Gait Rehabilitation System for Symmetric Stroke Gait,” J. Robot. Mechatron., Vol.24, No.5, pp. 884-893, 2012.
- [4] T. Kikuchi, K. Sakai, and K. Ishiya, “Gait Analysis with Automatic Speed-Controlled Treadmill,” J. Robot. Mechatron., Vol.27, No.5, pp. 528-534, 2015.
- [5] Ministry of Health, Labor and Welfare, “Important case summary information,” 2003 (in Japanese).
- [6] C. Okaniwa, H. Yamasaki, M. Kato, H. Asuma, and A. Kitahara, “Standing and Gait Training in Hemiplegic Patients with Pusher Sign – The approach using the physical guidance and fading method –,” J. of Kochi Rehabilitation Institute, Vol.7, pp. 55-60, 2006.
- [7] Japanese Society of Physical Therapy, “Physical therapy guidelines First Edition,” 2011 (in Japanese).
- [8] M. Yokota and M. Takaiwa, “Development of Non-Wearing Type Pneumatic Power Assist Device – Basic Concept and Performance Evaluation –,” J. Robot. Mechatron., Vol.32, No.5, pp. 1052-1060, 2020.
- [9] J. F. Veneman, R. Kruidhof, E. E. G. Hekman, R. Ekkelenkamp, E. H. F. van Asseldonk, and H. van der Kooij, “Design and Evaluation of the LOPES Exoskeleton Robot for Interactive Gait Rehabilitation,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.15, No.3, pp. 379-386, 2007.
- [10] Ministry of Health, Labor and Welfare, “National Health and Nutrition Survey Report,” 2017 (in Japanese).
- [11] D. B. Chaffin and G. B. J. Andersson, “Occupational Biomechanics,” Wiley, 1984.
- [12] M. Takaiwa and T. Noritsugu, “Positioning control of pneumatic parallel manipulator,” Int. J. Automation Technol., Vol.2, No.1, pp. 49-55, 2008.
- [13] N. Tsuda, A. Ito, M. Tounai, and Y. Nomura, “Development of Axillary Crutch Walking Trainer for Three-Point Gait,” Trans. of the Japanese Society for Medical and Biological Engineering, Vol.47, No.2, pp. 209-214, 2009 (in Japanese).
- [14] D. M. Bauer, D. C. Finch, K. P. McGough, C. J. Benson, K. Finstuen, and S. C. Allison, “A comparative analysis of several crutch-length-estimation techniques,” Phys. Ther., Vol.16, No.3, pp. 294-300, 1991.
- [15] I. T. Chang and A. D. Hohler, “Bilateral radial nerve compression (crutch palsy): a case report,” J. of Neurology & Neurophysiology, Vol.3, Issue 3, 1000130, doi: 10.4172/2155-9562.1000130, 2012. ≠wpage
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.