Paper:
Development of a Tele-Rehabilitation System Using an Upper Limb Assistive Device
Eiichiro Tanaka*, Wei-Liang Lian**, Yun-Ting Liao**, Hao Yang**, Li-Ning Li**, Hee-Hyol Lee*, and Megumi Shimodozono***
*Faculty of Science and Engineering, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0135, Japan
**Graduate School of Information, Production and Systems, Waseda University
2-7 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0135, Japan
***Department of Rehabilitation and Physical Medicine, Graduate School of Medical and Dental Sciences, Kagoshima University
8-35-1 Sakuragaoka, Kagoshima, Kagoshima 890-8544, Japan

A tele-rehabilitation system that can achieve remote interaction between a physical therapist (PT) and a patient was developed. Patients need to execute rehabilitation exercises to maintain upper limb function. However, it is difficult for them to travel to hospitals without aid. This system is equipped with a PC and a Kinect sensor at the hospital side (i.e., the PT), and a PC and an upper limb assistive device in the patient’s home. The PT displays the motion in front of a Kinect sensor, which identifies the motion. In addition, the device on the home side assists the motion of the patient using the Internet. When the device receives a force higher than the safety value from the patient at any particular point on it, vibrators at the corresponding point on the PT’s arm start to vibrate. Thereby, the PT can identify the patient’s condition and limitations. The time delays in the transmission of data of device motion and the vibrators were measured and compared. As a result, the PT could identify the patient’s condition faster than the motion of the device.
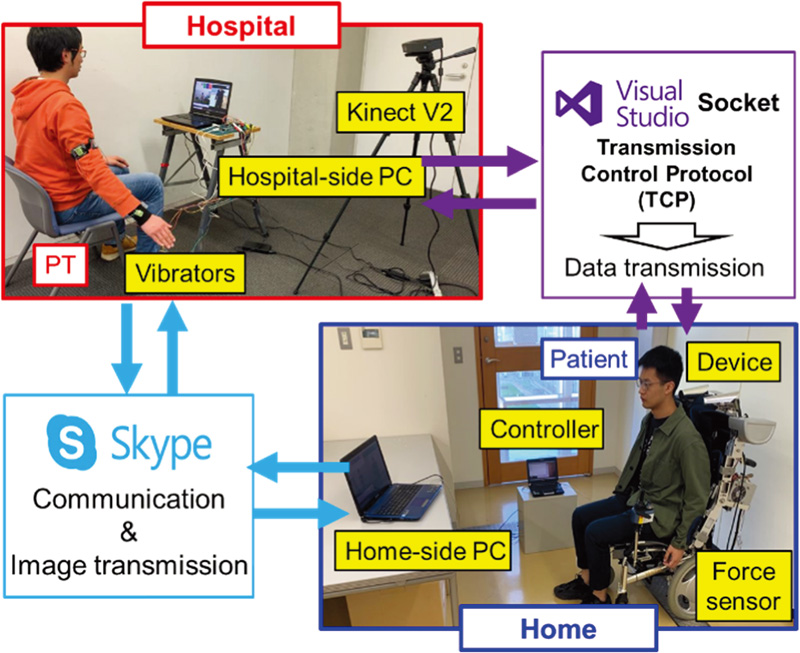
Tele-rehabilitation system using device
- [1] M. Solazzi, M. Abbrescia, R. Vertechy, C. Loconsole, V. Bevilacqua, and A. Frisoli, “An interaction torque control improving human force estimation of the rehab-exos exoskeleton,” 2014 IEEE Haptics Symp. (HAPTICS), pp. 187-193, 2014.
- [2] S. Balasubramanian, R. Wei, M. Perez, B. Shepard, E. Koeneman, J. Koeneman, and J. He, “RUPERT: An Exoskeleton Robot for Assisting Rehabilitation of Arm Functions,” 2008 Virtual Rehabilitation, pp. 163-167, 2008.
- [3] T. Kosaki and S. Li, “A Water-Hydraulic Upper-Limb Assistive Exoskeleton System with Displacement Estimation,” J. Robot. Mechatron., Vol.32, No.1, pp. 149-156, 2020.
- [4] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Development of Pneumatic Power Assist Splint “ASSIST” Operated by Human Intention,” J. Robot. Mechatron., Vol.17, No.5, pp. 568-574, 2005.
- [5] Y. Yamada, H. Arakawa, T. Watanabe, S. Fukuyama, R. Nishihama, I. Kikutani, and T. Nakamura, “TasKi: Overhead Work Assistance Device with Passive Gravity Compensation Mechanism,” J. Robot. Mechatron., Vol.32, No.1, pp. 138-148, 2020.
- [6] H. Kozuka, D. Uchijima, and H. Tachiya, “Motion-Assist Arm with a Passive Joint for an Upper Limb,” J. Robot. Mechatron., Vol.32, No.1, pp. 183-198, 2020.
- [7] J. Furusho and N. Takesue, “Research and Development of Rehabilitation Systems for the Upper Limbs ‘PLEMO’ Series,” J. Robot. Mechatron., Vol.31, No.1, pp. 35-44, 2019.
- [8] K. Miyawaki, “Link Type Arm Support Equipment,” J. Robot. Mechatron., Vol.27, No.1, pp. 110-111, 2015.
- [9] Z. Xiu, A. Kitagawa, C. Liu, H. Tsukagoshi, and K. Konishi, “An Internet-based tele-rehabilitation system with single-master and multi-slaves,” Proc. of the 7th JFPS Int. Symp. on Fluid Power, pp. 775-780, 2008.
- [10] E. Tanaka, S. Saegusa, Y. Iwasaki, and L. Yuge, “Development of an ADL Assistance Apparatus for Upper Limbs and Evaluation of Muscle and Cerebral Activity of the User,” J. of Advanced Mechanical Design, Systems, and Manufacturing, Vol.8, No.2, JAMDSM0010, 2014.
- [11] E. Tanaka, S. Saegusa, Y. Iwasaki, and L. Yuge, “Evaluation of Muscle and Cerebral Activity While Using an Upper Limb Motion Assistance Apparatus,” Trans. of the Society of Instrument and Control Engineers, Vol.51, No.5, pp. 336-343, 2015 (in Japanese).
- [12] Y.-T. Liao, C.-H. Zong, H.-H. Lee, and E. Tanaka, “Development of Kinect-based Upper-Limb Assistance Device for the Motions of Activities Daily Living,” 2018 IEEE Int. Conf. on Cyborg and Bionic Systems (CBS2018), pp. 222-227, 2018.
- [13] H. Yang, Y. Liao, H. Lee, and E. Tanaka, “Development of an upper-limb assistance device based on the predictable motion recognition system,” The 8th Int. Conf. on Manufacturing, Machine Design and Tribology (ICMDT2019), 2019.
- [14] H. Yang, Y. Liao, H. Lee, and E. Tanaka, “Development of a Wheelchair-Based Upper-Limb Assistance Device Controlled by a Predictive Motion Recognition System,” Robomech2019, 2P2-L06, 2019.
- [15] Y. Liao, H. Yang, H. Lee, and E. Tanaka, “Development and Evaluation of a Kinect-Based Motion Recognition System based on Kalman Filter for Upper-Limb Assistive Device,” 2019 58th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 1621-1626, 2019.
- [16] L. Li, Y. Liao, H. Duan, and E. Tanaka, “Development of a Motion Prediction System by Logistic Regression for the Kinect-Based Upper-Limb Assistive Device,” Robomech2020, 2P1-E07, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.