Paper:
Method to Record and Analyze the Operation of Seal Robot in Elderly Care
Kohei Kuramochi*, Kazuyoshi Wada*, Koji Kimita**, Haruka Kurokawa*, Kaoru Inoue***, and Yoshiki Shimomura*
*Graduate School of System Design, Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
**Graduate School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
***Graduate School of Human Health Sciences, Tokyo Metropolitan University
7-2-10 Higashi-Ogu, Arakawa-ku, Tokyo 116-8551, Japan

Robot therapy, a mental health care through interactions with robots, has attracted attention as a new method of dementia care. In particular, the therapeutic seal robot named “PARO” is being widely used. When using PARO in elderly facilities, caregivers called “handlers” encourage the elderly people to interact with PARO. However, the usage of PARO was left to the handlers itself. Therefore, there was no intended effect in certain cases. To solve this problem, this study aims to develop a method to record the behaviors of handlers and the reactions of elderly people during the robot therapy and a method to support planning by analyzing the recorded data. A Bayesian network was applied to analyze the relationship between the handler’s behavior and the elderly people’s reactions. To verify usefulness, the experiment was conducted at four elderly facilities between November 2019 and January 2020. The participants were 12 handlers and 21 elderly people. We observed the robot therapy using PARO for 20 min, and subsequently, conducted interviews. Consequently, a model that visualized the relationship between the handler’s behaviors and the elderly people’s reactions was obtained from 40 observed cases. The interviews confirmed that the model was useful for planning a robot therapy.
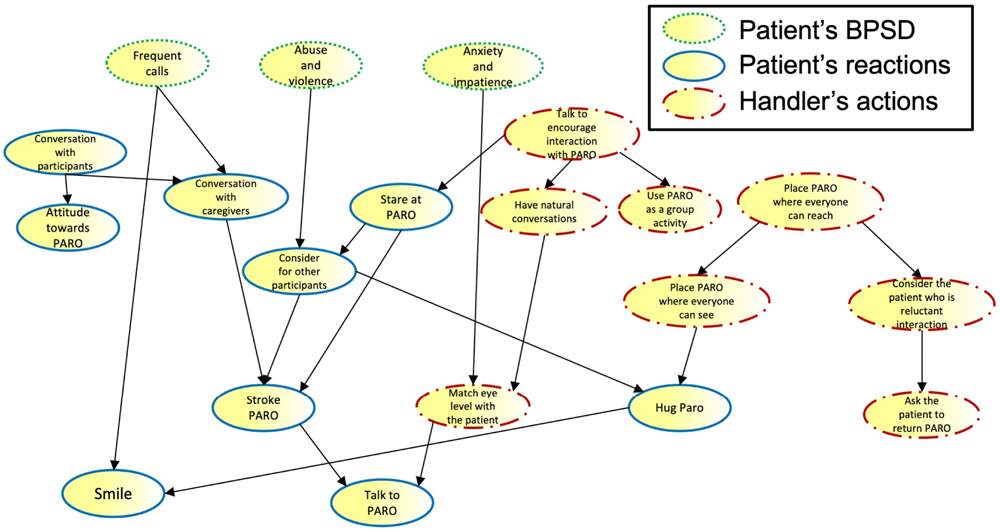
Bayesian network of the robot therapy
- [1] J. Gammonley and J. Yates, “Pet projects: Animal assisted therapy in nursing homes,” J. of Gerontological Nursing, Vol.17, No.1, pp. 12-15, 1991.
- [2] T. Shibata and K. Wada, “Robot therapy: A new approach for mental healthcare of the elderly – A mini-review,” Gerontology, Vol.57, No.4, pp. 378-386, 2011.
- [3] J. Abdi, A. Al-Hindawi, T. Ng, and M. P. Vizcaychipi, “Scoping review on the use of socially assistive robot technology in elderly care,” BMJ Open, Vol.8, No.2, e018815, 2018.
- [4] R. Bemelmans, G. J. Gelderblom, P. Jonker, and L. de Witte, “Socially assistive robots in elderly care: A systematic review into effects and effectiveness,” J. of the American Medical Directors Association, Vol.13, No.2, pp. 114-120, 2012.
- [5] J. Broekens, M. Heerink, and H. Rosendal, “Assistive social robots in elderly care: a review,” Gerontechnology, Vol.8, No.2, pp. 94-103, 2009.
- [6] K. Wada, T. Shibata, T. Asada, and T. Musha, “Robot therapy for prevention of dementia at home,” J. Robot. Mechatron., Vol.19, No.6, pp. 691-697, 2007.
- [7] T. Shibata and J. F. Coughlin, “Trends of robot therapy with neurological therapeutic seal robot, PARO,” J. Robot. Mechatron., Vol.26, No.4, pp. 418-425, 2014.
- [8] H. Robinson, B. MacDonald, N. Kerse, and E. Broadbent, “The Psychosocial Effects of a Companion Robot: A Randomized Controlled Trial,” J. of the American Medical Directors Association, Vol.14, No.9, pp. 661-667, 2013.
- [9] T. Shibata, K. Wada, T. Saito, and K. Tanie, “Robot Assisted Activity for Senior People at Day Service Center,” Proc. of Int. Conf. on Information Technology in Mechatronics, pp. 71-76, 2001.
- [10] T. Shibata, “Therapeutic seal robot as biofeedback medical device: Qualitative and quantitative evaluations of robot therapy in dementia care,” Proc. of the IEEE, Vol.100, No.8, pp. 2527-2538, 2012.
- [11] N. Jøranson, I. Pedersen, A. M. M. Rokstad, and C. Ihlebæk, “Effects on Symptoms of Agitation and Depression in Persons With Dementia Participating in Robot-Assisted Activity: A Cluster-Randomized Controlled Trial,” J. of the American Medical Directors Association, Vol.16, No.10, pp. 867-873, 2015.
- [12] K. Wada and T. Shibata, “Social effects of robot therapy in a care house-change of social network of the residents for one year,” J. Adv. Comput. Intell. Intell. Inform., Vol.13, No.4, pp. 386-392, 2009.
- [13] T. Saito, T. Shibata, K. Wada, and K. Tanie, “Examination of change of stress reaction by urinary tests of elderly before and after introduction of mental commit robot to an elderly institution,” Proc. of the 7th Int. Symp. on Artificial Life and Robotics, Vol.1, pp. 316-319, 2002.
- [14] R. Bemelmans, G. J. Gelderblom, P. Jonker, and L. de Witte, “Effectiveness of Robot Paro in Intramural Psychogeriatric Care: A Multicenter Quasi-Experimental Study,” J. of the American Medical Directors Association, Vol.16, No.11, pp. 946-950, 2015.
- [15] S. C. Weller and A. K. Romney, “Systematic data collection,” Sage Publications, 1988.
- [16] A. Jonsson and G. Svingby, “The use of scoring rubrics: Reliability, validity and educational consequences,” Educational Research Review, Vol.2, No.2, pp. 130-144, 2007.
- [17] K. Wada, Y. Ikeda, K. Inoue, and R. Uehara, “Development and preliminary evaluation of a caregiver’s manual for robot therapy using the therapeutic seal robot Paro,” Proc. of the 19th Int. Symp. in Robot and Human Interactive Communication, pp. 533-538, 2010.
- [18] K. Wada, Y. Takasawa, and T. Shibata, “Robot therapy at facilities for the elderly in Kanagawa prefecture-a report on the experimental result of the first month,” Proc. of the 23rd IEEE Int. Symp. on Robot and Human Interactive Communication, pp. 193-198, 2014.
- [19] J. Pearl, “Probabilistic Reasoning in Intelligent Systems,” Elsevier, 1988.
- [20] J. Pearl and S. Russell, “Bayesian Networks Handbook of Brain Theory and Neural Networks,” MIT Press Cambridge, 2001.
- [21] G. Anitha and S. Baghavathi Priya, “Posture based health monitoring and unusual behavior recognition system for elderly using dynamic Bayesian network,” Cluster Computing, Vol.22, No.6, pp. 13583-13590, 2019.
- [22] F. L. Seixas, B. Zadrozny, J. Laks, A. Conci, and D. C. M. Saade, “A Bayesian network decision model for supporting the diagnosis of dementia, Alzheimer’s disease and mild cognitive impairment,” Computers in Biology and Medicine, Vol.51, pp. 140-158, 2014.
- [23] J. Cerejeira, L. Lagarto, and E. Mukaetova-Ladinska, “Behavioral and psychological symptoms of dementia,” Frontiers in Neurology, Vol.3, p. 73, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.