Paper:
Proposal of Wheeled Gait-Training Walker with Dual-Assist Arms and Preliminary Pelvis-Handling Control
Kenji Uegami*, Hiroki Aoyama**, Katsushi Ogawa*, Kazuo Yonenobu***, and Seonghee Jeong*
*Osaka Electro-Communication University
18-8 Hatsucho, Neyagawa, Osaka 572-8530, Japan
**Aino University
4-5-4 Higashioda, Ibaraki, Osaka 567-0012, Japan
***Osaka Yukioka College of Health Science
1-1-41 Sojiji, Ibaraki, Osaka 567-0801, Japan

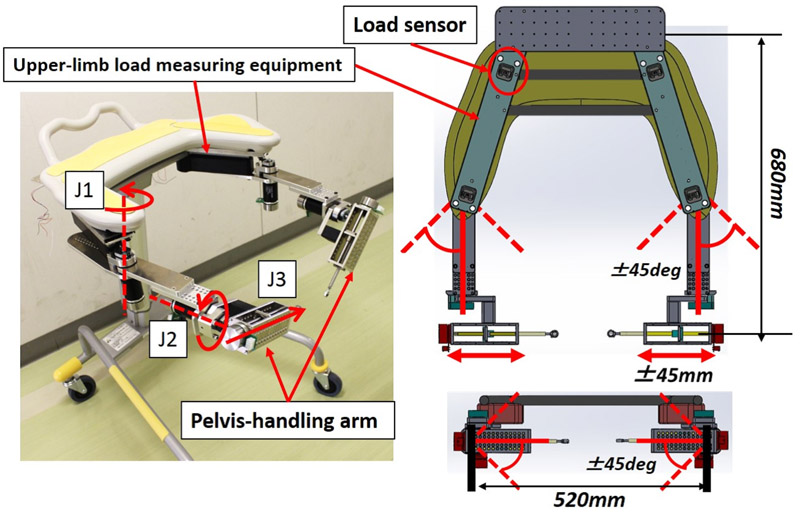
To achieve good rehabilitation in a person, the amount of walking by the person must be increased. Herein, a compact wheeled gait-training walker with dual-assist arms for assisting pelvic motion is proposed. The training walker is constructed by modifying a commercial wheeled walker with armrests. Therefore, it can be used easily by patients to perform their daily activities at rehabilitation sites. The hardware system and controller of the proposed assisting arms are designed based on gait-assist motions conducted by a physical therapist. The dual arms can achieve a pelvis-assisting motion with five degrees of freedom. A trajectory-following control with virtual compliance is implemented for the arms. Gait-assisting experiments are conducted, in which the dual arms allow a pelvic-like plate to follow the trajectory of a reference pose while reducing the upper body’s weight resting on the armrests. A 20 N force on the armrests, which represents the upper-limb load, is reduced while the plate follows the trajectory, and the proposed gait-assisting controller is validated.
Appearance of proposed training walker
- [1] K. Kondo, “Rehabilitation Intensity and its Effect,” The Japanese J. of Rehabilitation Medicine, Vol.41, No.12, pp. 849-853, 2004.
- [2] K. H. Low, “Recent Development and Trends of Clinical-Based Gait Rehabilitation Robots,” Intelligent Assistive Robots, pp. 41-75, 2015.
- [3] S. Matsumoto, “Robot-assisted Rehabilitation for Patients with Spinal Cord Injury,” Spinal Surgery, Vol.33, No.2, pp. 132-140, 2019.
- [4] M. Bernhardt, M. Frey, G. Colombo, and R. Riener, “Hybrid Force-Position Control Yields Cooperative Behaviour of the Rehabilitation Robot LOKOMAT,” Int. Conf. on Rehabilitation Robotics, 2005.
- [5] H. Yano, T. Masuda, Y. Nakajima et al., “Development of a Gait Rehabilitation System With a Spherical Immersive Projection Display,” J. Robot. Mechatron., Vol.20, No.6, pp. 836-845, 2008.
- [6] T. Ando, E. Ohki, Y. Nakashima et al., “Pilot Study of Split Belt Treadmill Based Gait Rehabilitation System for Symmetric Stroke Gait,” J. Robot. Mechatron., Vol.24, No.5, pp. 884-893, 2012.
- [7] T. Kikuchi, K. Sakai, and K. Ishiya, “Gait Analysis With Automatic Speed-Controlled Treadmill,” J. Robot. Mechatron., Vol.27, No.5, pp. 528-534, 2015.
- [8] T. Miyake, Y. Kobayashi, M. G. Fujie, and S. Sugano, “One-DOF Wire-Driven Robot Assisting Both Hip and Knee Flexion Motion,” J. Robot. Mechatron., Vol.31, No.1, pp. 135-142, 2019.
- [9] C. Bayón, O. Ramirez, J. I. Serrano et al., “Development and evaluation of a novel robotic platform for gait rehabilitation in patients with Cerebral Palsy: CPWalker,” Robotics and Autonomous Systems, Vol.91, pp. 101-114, 2017.
- [10] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Development of High Contractile Pneumatic Artificial Rubber Muscle for Power Assist Device,” J. Robot. Mechatron., Vol.24, No.1, pp. 150-157, 2012.
- [11] H. Kobayashi, T. Hashimoto, S. Nakayama, and K. Irie, “Development of an Active Walker and its Effect,” J. Robot. Mechatron., Vol.24, No.2, pp. 275-283, 2012.
- [12] E. Tanaka, T. Ikehara, H. Yusa et al., “Walking-Assistance Apparatus as a Next-Generation Vehicle and Movable Neuro-Rehabilitation Training Appliance,” J. Robot. Mechatron., Vol.24, No.5, pp. 851-865, 2012.
- [13] K.-R. Mun, B. B. S. Yeo, Z. Guo et al., “Resistance training using a novel robotic walker for over?ground gait rehabilitation: a preliminary study on healthy subjects,” Med. Biol. Eng. Comput., Vol.55, No.10, pp. 1873-1881, 2017.
- [14] P. Metrailler, R. Brodard, Y. Stauffer, R. Clavel, and R. Frischknecht, “Cyberthosis: Rehabilitation Robotics With Controlled Electrical Muscle Stimulation,” Rehabilitation Robotics, pp. 303-318, 2007.
- [15] K. Uegami, H. Aoyama, K. Ogawa, K. Yonenobu, and S. Jeong, “Proposal of Rolling Type Training Walker with Gait Handling Device,” 19th Int. Conf. on Control, Automation and Systems (ICCAS), pp. 168-172, 2019.
- [16] H. Aoyama et al., “The movement of trunk and pelvis in the rolling stand-up walker: Primary research for the exploitation of rehabilitation walker,” 19th Int. Conf. on Control, Automation and Systems (ICCAS), pp. 393-396, 2019.
- [17] J. Okada, J. Taguchi, T. Nakatani, S. Jeong, K. Ogawa, and K. Uegami, “Upper Limbs Load Measurement for Autonomy Evaluation in Walker Training after Lower Limb Surgery,” Int. Society of Physical and Rehabilitation Medicine (ISPRM), P3-1066, 2019.
- [18] J. Perry, “Gait Analysis Normal and Pathological Function,” Thorofare, 1992.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.