Paper:
Three-Dimensional Trajectory Construction and Observation of Group Behavior of Wild Bats During Cave Emergence
Emyo Fujioka*1, Mika Fukushiro*2, Kazusa Ushio*3, Kyosuke Kohyama*4, Hitoshi Habe*5, and Shizuko Hiryu*3
*1Organization for Research Initiatives and Development, Doshisha University
1-3 Tatara-miyakodani, Kyotanabe, Kyoto 610-0321, Japan
*2Graduate School of Life and Medical Sciences, Doshisha University
1-3 Tatara-miyakodani, Kyotanabe, Kyoto 610-0321, Japan
*3Faculty of Life and Medical Sciences, Doshisha University
1-3 Tatara-miyakodani, Kyotanabe, Kyoto 610-0321, Japan
*4Graduate School of Science and Engineering, Kindai University
3-4-1 Kowakae, Higashiosaka, Osaka 577-8502, Japan
*5Faculty of Science and Engineering, Kindai University
3-4-1 Kowakae, Higashiosaka, Osaka 577-8502, Japan

Echolocating bats perceive the surrounding environment by processing echoes of their ultrasound emissions. Echolocation enables bats to avoid colliding with external objects in complete darkness. In this study, we sought to develop a method for measuring the collective behavior of echolocating bats (Miniopterus fuliginosus) emerging from their roost cave using high-sensitivity stereo-camera recording. First, we developed an experimental system to reconstruct the three-dimensional (3D) flight trajectories of bats emerging from the roost for nightly foraging. Next, we developed a method to automatically track the 3D flight paths of individual bats so that quantitative estimation of the population in proportion to the behavioral classification could be conducted. Because the classification of behavior and the estimation of population size are ecologically important indices, the method established in this study will enable quantitative investigation of how individual bats efficiently leave the roost while avoiding colliding with each other during group movement and how the group behavior of bats changes according to weather and environmental conditions. Such high-precision detection and tracking will contribute to the elucidation of the algorithm of group behavior control in creatures that move in groups together in three dimensions, such as birds.
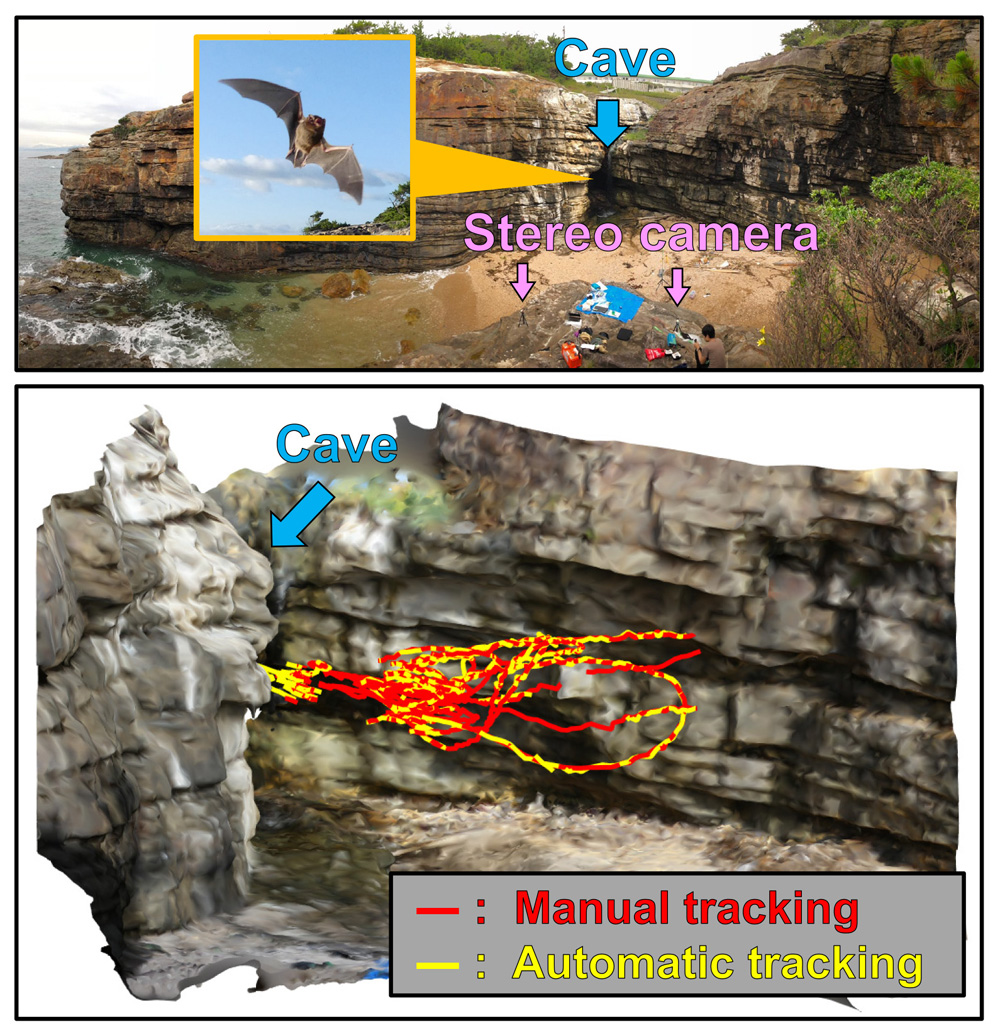
Stereo-camera recording and automatic tracking
- [1] W. R. Siegfried and L. G. Underhill, “Flocking as an anti-predator strategy in doves,” Anim. Behav., Vol.23, pp. 504-508, doi: 10.1016/0003-3472(75)90126-8, 1975.
- [2] I. L. Bajec and F. H. Heppner, “Organized flight in birds,” Anim. Behav., Vol.78, pp. 777-789, doi: 10.1016/j.anbehav.2009.07.007, 2009.
- [3] D. Sumpter, J. Buhl, D. Biro, and I. Couzin, “Information transfer in moving animal groups,” Theory Biosci., Vol.127, pp. 177-186, doi: 10.1007/s12064-008-0040-1, 2008.
- [4] D. J. T. Sumpter, “The principles of collective animal behaviour,” Philosophical Trans. of the Royal Society B, Biological Sciences, Vol.361, Issue 1465, pp. 5-22, doi: 10.1098/rstb.2005.1733, 2006.
- [5] I. D. Couzin, “Collective cognition in animal groups,” Trends Cogn. Sci., Vol.13, Issue 1, pp. 36-43, doi: 10.1016/j.tics.2008.10.002, 2009.
- [6] T. Vicsek and A. Zafeiris, “Collective motion,” Phys. Rep., Vol.517, Issues 3-4, pp. 71-140, doi: 10.1016/j.physrep.2012.03.004, 2012.
- [7] M. Nagy, Z. Ákos, D. Biro, and T. Vicsek, “Hierarchical group dynamics in pigeon flocks,” Nature, Vol.464, pp. 890-894, doi: 10.1038/nature08891, 2010.
- [8] K. Yoda, “Advances in bio-logging techniques and their application to study navigation in wild seabirds,” Advanced Robotics, Vol.33, pp. 108-117, doi: 10.1080/01691864.2018.1553686, 2018.
- [9] R. Lukeman, Y.-X. Li, and L. Edelstein-Keshet, “Inferring individual rules from collective behavior,” Proc. Natl. Acad. Sci. USA, Vol.107, No.28, pp. 12576-12580, doi: 10.1073/pnas.1001763107, 2010.
- [10] Y. Katz, K. Tunstrøm, C. C. Ioannou, C. Huepe, and I. D. Couzin, “Inferring the structure and dynamics of interactions in schooling fish,” Proc. Natl. Acad. Sci. USA, Vol.108, pp. 18720-18725, doi: 10.1073/pnas.1107583108, 2011.
- [11] M. Moussaïd, D. Helbing, and G. Theraulaz, “How simple rules determine pedestrian behavior and crowd disasters,” Proc. Natl. Acad. Sci. USA, Vol.108, No.17, pp. 6884-6888, doi: 10.1073/pnas.1016507108, 2011.
- [12] D. R. Griffin, “Listening in the dark: Acoustic Orientation of Bats and Men,” Yale University Press, 1958.
- [13] J. A. Simmons, M. B. Fenton, and M. J. O’Farrell, “Echolocation and pursuit of prey by bats,” Science, Vol.203, pp. 16-21, doi: 10.1126/science.758674, 1979.
- [14] K. Hase, Y. Kadoya, Y. Maitani, T. Miyamoto, K. I. Kobayasi, and S. Hiryu, “Bats enhance their call identities to solve the cocktail party problem,” Communications Biology, Vol.1, No.39, doi: 10.1038/s42003-018-0045-3, 2018.
- [15] R. Inoue, K. Maeda, H. Xu, M. Tsumura, and K. Suzuki, “Migration of Overwinter Colony of Bent-winged Bats, Miniopterus fuliginosus in Simokitayama Mura, Nara-Prefecture (1) Nursery site,” Bulletin of Center for Natural Environmental Education, Nara University of Education, Vol.6, pp. 1-5, 2004 (in Japanese).
- [16] Y. Ikegami, S. Sakurai, and K. Yabe, “DLT methods,” Jpn. J. Sports Sci., Vol.10, pp. 191-195, 1991 (in Japanese).
- [17] R. Shapiro, “Direct linear transformation method for three-dimensional cinematography,” Res. Quart, Vol.49, Issue 2, pp. 197-205, doi: 10.1080/10671315.1978.10615524, 1978.
- [18] Z. Zivkovic and F. Heijden, “Efficient adaptive density estimation per image pixel for the task of background subtraction,” Pattern Recognition Letters, Vol.27, Issue 7, pp. 773-780, doi: 10.1016/j.patrec.2005.11.005, 2006.
- [19] K. Wu, E. Otoo, and K. Suzuki, “Optimizing two-pass connected-component labeling algorithms,” Pattern Anal. Applic., Vol.12, pp. 117-135, doi: 10.1007/s10044-008-0109-y, 2009.
- [20] T. Akita, Y. Yamauchi, and H. Fujiyoshi, “Stereo Vision by Combination of Machine-Learning Techniques for Pedestrian Detection at Intersections Utilizing Surround-View Cameras,” J. Robot. Mechatron., Vol.32, No.3, pp. 494-502, doi: 10.20965/jrm.2020.p0494, 2020.
- [21] Z. Zhang, “Determining the epipolar geometry and its uncertainty: A review,” Int. J. Comput. Vis., Vol.27, Issue 2, pp. 161-195, doi: 10.1023/A:1007941100561, 1998.
- [22] B. M. Sabol and M. K. Hudson, “Technique using thermal infrared-imaging for estimating populations of gray bats,” J. Mammal., Vol.76, Issue 4, pp. 1242-1248, doi: 10.2307/1382618, 1995.
- [23] N. I. Hristov, M. Betke, and T. H. Kunz, “Applications of thermal infrared imaging for research in aeroecology,” Integr. Comp. Biol., Vol.48, Issue 1, pp. 50-59, doi: 10.1093/icb/icn053, 2008.
- [24] H. G. Erkert, “Ecological aspects of bat activity rhythms,” T. H. Kunz (Ed.), “Ecology of bats,” Springer, pp. 201-242, doi: 10.1007/978-1-4613-3421-7_5, 1982.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.