Paper:
Unmanned Aircraft System Traffic Management (UTM) Simulation of Drone Delivery Models in 2030 Japan
Atsushi Oosedo, Hiroaki Hattori, Ippei Yasui, and Kenya Harada
Chofu Aerospace Center Aerodrome Branch, Japan Aerospace Exploration Agency (JAXA)
6-13-1 Osawa, Mitaka, Tokyo 181-0015, Japan

An unmanned aircraft system traffic management (UTM) system to support flights beyond visual line-of-sight is considered necessary for the promotion of commercial drone use. In the research and development of UTM systems, cost and time constraints make it difficult to actually fly a large number of drones in the same airspace, so research is mainly conducted using a simulator. This paper presents details of a UTM simulator named the “scalable simulator for knowledge of low-altitude environment” (SKALE) developed by the Japan Aerospace Exploration Agency (JAXA), with respect to the construction of a model case of drone delivery model set in 2030 in Japan. Moreover, UTM concepts for airspace safety and efficient airspace utilization (parcel transport) are proposed and evaluated using JAXA’s UTM simulator and drone delivery model cases. Simulation results are discussed, and the knowledge gained for the improvement of airspace safety and airspace utilization (parcel transport) efficiency is documented.
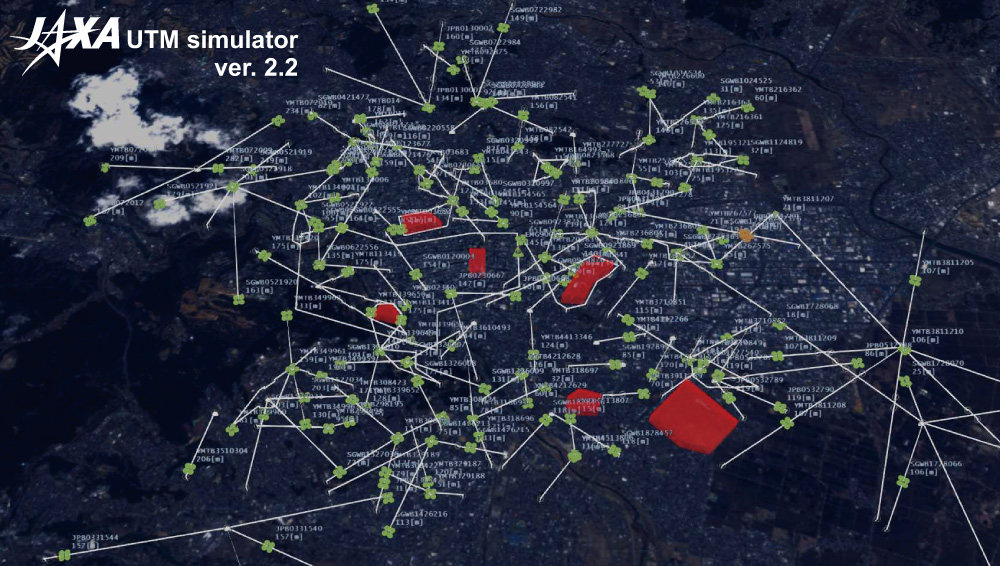
UTM simulation of drone delivery in 2030 Japan
- [1] J. E. Scott and C. H. Scott, “Drone Delivery Models for Healthcare,” Proc. the 50th Hawaii Int. Conf. on System Sciences, pp. 3297-3304, 2017.
- [2] K. Nonami, “Research and Development of Drone and Roadmap to Evolution,” J. Robot. Mechatron., Vol.30, No.3, pp. 322-336, 2018.
- [3] P. Kopardekar, J. Rios, T. Prevot, M. Johnson, J. Jung, and J. E. Robinson III, “Unmanned Aircraft System Traffic Management (UTM) Concept of Operations,” Proc. 16th AIAA Aviation Technology, Integration, and Operations Conf., pp. 1-16, 2016.
- [4] M. Johnson, J. Jung, J. Rios, J. Mercer, J. Homola, T. Prevot, D. Mulfinger, and P. Kopardekar, “Flight Test Evaluation of an Unmanned Aircraft System Traffic Management (UTM) Concept for Multiple Beyond-Visual-Line-of-Sight Operations,” Proc. Twelfth USA/Europe Air Traffic Management Research and Development Seminar, pp. 1-10, 2017.
- [5] X. Min and R. Joseph, “Initial Study of An Effective Fast-time Simulation Platform for Unmanned Aircraft System Traffic Management,” Proc. of AIAA AVIATION Forum 2017, 17th AIAA Aviation Technology, Integration, and Operations Conf., pp. 1-10, 2017.
- [6] X. Min, R. Joseph, A. Ishihara and Z. Zhu, “Fe3: An Evaluation Tool for Low-Altitude Air Traffic Operations,” AIAA AVIATION Forum 2018, Proc. 18th AIAA Aviation Technology, Integration, and Operations Conf., pp. 1-13, 2018.
- [7] X. Min and M. Do, “Scenario Complexity for Unmanned Aircraft System Traffic,” Proc. AIAA AVIATION 2019 Forum, pp. 1-10, 2019.
- [8] J. A. Millan-Romera, J. J. Acevedo, A. R. Castano, H. Perez-Leon, C. Capitan, and A. Ollero, “A UTM simulator based on ROS and Gazebo,” Proc. 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems, pp. 132-141, 2020.
- [9] F. Ho, R. Geraldes, A. Goncalves, M. Cavazza, and H. Prendinger, “Improved Conflict Detection and Resolution for Service UAVs in Shared Airspace,” IEEE Trans. on Vehicular Technology, Vol.68, No.2, pp. 1231-1242, 2019.
- [10] F. Ho, A. Salta, R. Geraldes, A. Goncalves, M. Cavazza, and H. Prendinger, “Multi-agent path finding for UAV traffic management,” Proc. The 18th Int. Conf. on Autonomous Agents and Multi Agent Systems, pp. 131-139, 2019.
- [11] Q. Tan, Z. Wang, Y. Ong, and K. H. Low, “Evolutionary Optimization-based Mission Planning for UAS Traffic Management (UTM),” Proc. 2019 Int. Conf. on Unmanned Aircraft Systems, pp. 952-958, 2019.
- [12] A. Oosedo, T. Kohno, D. Kubo, and K. Harada, “A study on flight management system for out-of-sight flight of small unmanned aerial vehicles,” Proc. of the 34th Annual Conf. of the Robotics Society of Japan, 1F2-05, 2016 (in Japanese).
- [13] D. Jenkins, B. Vasigh, C. Oster, and T. Larsen, “Forecast of the Commercial UAS Package Delivery Market,” Embry-Riddle Aeronautical University, 2017.
- [14] C. R. Russell, J. Jung, G. Willink, and B. Glasner, “Wind Tunnel and Hover Performance Test Results for Multicopter UAS Vehicles,” Proc. American Helicopter Society (AHS) Int. Annual Forum and Technology Display, 20160007399, 2016.
- [15] M. Sato, K. Muraoka, and K. Hozumi, “Flight Control Design and Demonstration of Unmanned Airplane for Radiation Monitoring System,” Proc. of the 19th World Congress of the Int. Federation of Automatic Control, pp. 2527-2532, 2014.
- [16] E. Masuda, “On the Present Parcel Delivery Services and Their Improvements,” Bulletin of Faculty of Distribution and Logistics Systems of Ryutsu Keizai University, Vol.11, No.1, pp. 31-48, 2006 (in Japanese).
- [17] W. C. Chiang, Y. Li, J. Shang, and T. L. Urban, “Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization,” Applied Energy, Vol.242, pp. 1164-1175, 2019.
- [18] M. Arahata, “Policy Trends for Achieving Societies in which Drones Play an Active Role,” The Int. Association of Traffic and Safety Sciences (IATSS) Review, Vol.44, No.2, pp. 90-91, 2019 (in Japanese).
- [19] “Flying Qualities of Piloted Aircraft. Department of Defense Handbook. MIL-HDBK-1797B,” Washington, DC: U.S. Department of Defense, 2012.
- [20] H. Kurokawa and H. Yamato, “Effects of Hub Terminal on Physical Distribution System,” The J. of Japan Institute of Navigation, Vol.95, pp. 343-350, 1996 (in Japanese).
- [21] J. F. Campbell, “Freight Consolidation and Routing With Transportation Economies of Scale,” Transportation Resarch, Vol.24, No.5, pp. 345-361, 1990.
- [22] I. Hong, M. Kuby, and A. T. Murray, “A range-restricted recharging station coverage model for drone delivery service planning,” Transportation Research Part C: Emerging Technologies, Vol.90, pp. 198-212, 2018.
- [23] Act on National Debt for Facilities of Compulsory Education Schools (Article 4, paragraph 2).
- [24] Act on Standards for Class Formation and Fixed Number of School Personnel in Public Compulsory Education Schools (Article 3, paragraph 2).
- [25] Enforcement Regulations for the School Education Law Article 41.
- [26] RTCA.inc (Radio Technical Commission for Aeronautics), “DO-365 Minimum Operational Performance Standards (MOPS) for Detect and Avoid System.”
- [27] K. Ozaki, H. Asama, Y. Ishida, A. Matsumoto, and I. Endo, “Collision Avoidance Using Communication between Autonomous Mobile Robots,” J. Robot. Mechatron., Vol.8, No.5, pp. 459-466, 1996.
- [28] J. van den Berg, S. J. Guy, M. Lin, and D. Manocha, “Reciprocal n-body collision avoidance,” C. Pradalier, R. Siegwart, and G. Hirzinger (Eds.), “Robotics Research: The 14th Int. Symp. ISRR, (Springer Tracts in Advanced Robotics, Vol.70),” 2011.
- [29] D. Iwakura and K. Nonami, “Indoor Localization of Flying Robot by Means of Infrared Sensors,” J. Robot. Mechatron., Vol.25, No.1, pp. 201-210, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.