Paper:
Quadrotor Drone Hovering in Ground Effect
Yasutada Tanabe*1, Hideaki Sugawara*1, Shigeru Sunada*2, Koichi Yonezawa*3, and Hiroshi Tokutake*4
*1Japan Aerospace Exploration Agency (JAXA)
6-13-1 Osawa, Mitaka, Tokyo 181-0015, Japan
*2Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan
*3Central Research Institute of Electric Power Industry (CRIEPI)
1646 Abiko, Abiko-shi, Chiba 270-1194, Japan
*4Kanazawa University
Kakuma-machi, Kanazawa, Ishikawa 920-1192, Japan

A variable-pitch-controlled quadrotor drone was simulated in the ground effect using a high-fidelity CFD solver. In contrast to a single rotor in the ground effect, which has been extensively studied for conventional helicopters, the flow fields around multiple rotors are complex. In this study, the rotating speed of the rotors was maintained constant, and the blade pitch angles were adjusted so that the total thrust of the multicopter was the same regardless of the rotor height from the ground. It was observed that the power required for the quadrotors, which generate the same thrust, decreases when the rotors are approaching the ground from the height where they can be considered to be out of the ground effect, but increases locally when the rotor height is approximately the rotor radius, owing to flow recirculation into the rotor, and then decreases abruptly when the rotors further approach the ground. The outwash from the quadrotors depends heavily on the direction relative to the quadrotor layout. Along the plane crossing the diagonal rotor centers, the outwash velocity profiles resemble those of a single rotor; however, the outwash from the rotor gaps is stronger and extends to a much higher altitude.
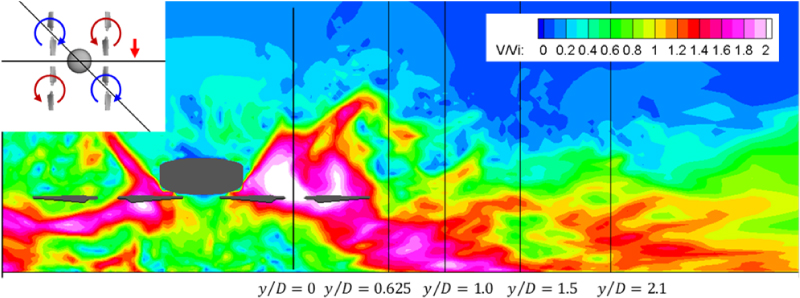
Flow along the section of rotor gap center
- [1] Y. Tanabe, S. Saito, N. Ooyama, and K. Hiraoka, “Study of a Downwash Caused by a Hovering Rotor in Ground Effect,” Proc. of 34th European Rotorcraft Forum, Liverpool, UK, pp. 589-599, 2008.
- [2] I. C. Cheeseman and W. E. Bennett, “The effect of the ground on a helicopter rotor,” ARC R&M, No.3021, pp. 1-10, 1955.
- [3] T. O’Bryan, “An Investigation of the effect of downwash from a VTOL aircraft and a helicopter in the ground environment,” NASA Technical Note, D-977, 1961.
- [4] J. S. Hayden, “The effect of the ground on helicopter hover power required,” Proc. of AHS 32nd Annual Forum, Washington, DC, pp. 1-11, 1976.
- [5] H. Usuda, N. Iboshi, and N. Itoga, “Ground effect of a hovering rotor over confined area,” 45th Aircraft Symp., Kitakyushu, Japan, October 10-12, 2007 (in Japanese).
- [6] J. Schmaus, B. Berry, W. Gross, and P. Koliais, “Experimental Study of Rotor Performance in Deep Ground Effect with Application to a Human-Powered Helicopter,” Proc. of American Helicopter Society 68th Annual Forum, Fort Worth, TX, pp. 1-12, 2012.
- [7] M. Sugiura, Y. Tanabe, H. Sugawara, N. Matayoshi, and H. Ishii, “Numerical Simulations and Measurements of the Helicopter Wake in Ground Effect,” J. of Aircraft, Vol.54, No.1, pp. 209-219, 2017.
- [8] Y. Tanabe, T. Aoyama, M. Sugiura, H. Sugawara, S. Sunada, K. Yonezawa, and H. Tokutake, “Numerical Simulations of Aerodynamic Interactions Between Multiple Rotors,” Proc. of 42nd European Rotorcraft Forum (ERF), Lille, France, 94, 2016.
- [9] M. Kohno, H. Otsuka, S. Kiribayashi, and K. Nagatani, “Investigation on Relationship between Rotors Axis Length and Ground Effect on a Small Quadrotor UAV Performance,” Proc. of the Robotics and Mechatronics Conf. 2017 in Fukushima, 1P2-F02, 2017 (in Japanese).
- [10] M. Kohno, “Visualization of the Upstream Flow of Rotors and Analysis on Thrust of a Small Quadrotor UAV in Ground Effect,” Proc. of 55th Aircraft Symp., Shimane, Japan, JSASS-2017-5022, 2017 (in Japanese).
- [11] K. Yonezawa, H. Matsumoto, K. Sugiyama, Y. Tanabe, H. Tokutake, and S. Sunada, “Aerodynamic Characteristics of a Quad-Rotor-Drone with Ducted Rotors,” Proc. of 8th Asian/Australian Rotorcraft Forum, Ankara, Turkey, pp. 1-7, 2019.
- [12] Y. Tanabe, S. Saito, and H. Sugawara, “Construction and Validation of an Analysis Tool Chain for Rotorcraft Active Noise Reduction,” Proc. of 38th European Rotorcraft Forum, Amsterdam, NL, pp. 235-247, 2012.
- [13] A. Hashimoto, K. Murakami, T. Aoyama, K. Ishiko, M. Hishida, M. Sakashita, and P. Lahur, “Toward the fastest unstructured CFD code ‘FaSTAR’,” Proc. of 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, Tennessee, AIAA-2012-1075, doi: 10.2514/6.2012-1075, 2012.
- [14] Y. Tanabe, S. Saito, O. Takayama, D. Sasaki, and K. Nakahashi, “A New Hybrid Method of Overlapping Structured Grids Combined with Unstructured Fuselage Grids for Rotorcraft Analysis,” Proc. of 36th European Rotorcraft Forum, Paris, France, September 9-11, 2010.
- [15] Y. Tanabe, T. Aoyama, M. Sugiura, H. Sugawara, S. Sunada, K. Yonezawa, and H. Tokutake, “Multiple Rotors Hovering Near an Upper or a Side Wall,” J. Robot. Mechatron., Vol.30, No.3, pp. 344-353, 2018.
- [16] E. Shima and K. Kitamura, “On New Simple Low-Dissipation Scheme of AUSM-Family for All Speeds,” Proc. of 47th AIAA Aerospace Sciences Meeting, Orlando, FA, 2009-136, 2009.
- [17] Y. Tanabe and S. Saito, “Significance of All-Speed Scheme in Application to Rotorcraft CFD Simulations,” Proc. of the 3rd Int. Basic Research Conf. on Rotorcraft Technology, Nanjing, China, 2009.
- [18] S. Yamamoto and H. Daiguji, “Higher-Order-Accurate Upwind Schemes for Solving the Compressible Euler and Navier-Stokes Equations,” Computers and Fluids, Vol.22, No.2/3, pp. 259-270, 1993.
- [19] L. P. Zhang and Z. J. Wang, “A Block LU-SGS Implicit Dual Time-Stepping Algorithm for Hybrid Dynamic Meshes,” Computers and Fluids, Vol.33, pp. 891-916, 2004.
- [20] A. Jameson and T. J. Baker, “Solution of the Euler equations for Complex Configuration,” Proc. of 6th Computational Fluid Dynamics Conf. Danvers, Danvers, MA, USA, 83-1929, doi: 10.2514/6.1983-1929, 1983.
- [21] Y. Tanabe, H. Sugawara, K. Yonezawa, S. Sunada, and H. Tokutake, “Influence of Rotor Blade Twist on Ducted Rotor Performance,” Proc. of 8th Asian/Australian Rotorcraft Forum, Ankara, Turkey, pp. 1-6, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.