Paper:
Motion Analysis of Butterfly-Style Flapping Robot Using CFD Based on 3D-CAD Model and Experimental Flight Data
Keisuke Sanuki and Taro Fujikawa
Graduate School of Science and Technology for Future Life, Tokyo Denki University
5 Senju Asahi-cho, Adachi-ku, Tokyo 120-8551, Japan

In this paper, a computational fluid dynamics (CFD) analysis system based on a 3D-CAD model of a butterfly-style flapping robot using its experimental flight data is proposed. The butterfly-style flapping robot can control its attitude by changing its flapping and lead-lag angles; however, measuring the lift, thrust, and body pitch moment directly during flight is difficult. In the case of the flight motion analysis of insects, the state of flight has been photographed, and numerical analysis has been performed to obtain the flow field around the wings. However, when performing the motion analysis of hardware, it is difficult to reflect the shape of the body accurately using this method. In this study, a CFD analysis system considered the shape of the developed butterfly-style flapping robot as 3D-CAD data and analyzed the flow field around the wings using the experimental flight data of the hardware. The results of motion analysis showed that the attitude during flight differs due to the difference in lifts and body pitch moments in the flight experiment data of the hardware with different neutral angles of the flapping wings.
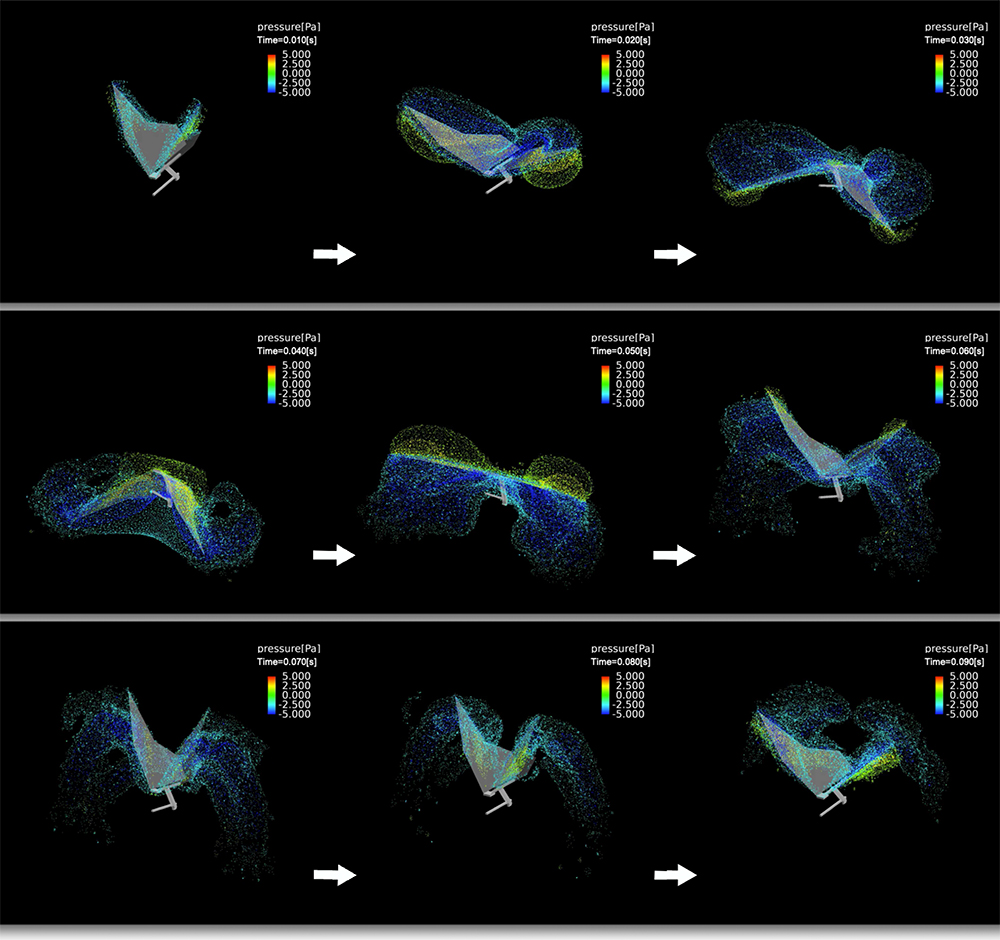
Pressure distribution around the wings
- [1] K. Nonami, “Drone Technology, Cutting-Edge Drone Business, and Future Prospects,” J. Robot. Mechatron., Vol.28, No.3, pp. 262-272, 2016.
- [2] K. Nonami, “Research and Development of Drone and Roadmap to Evolution,” J. Robot. Mechatron., Vol.30, No.3, pp. 332-336, 2018.
- [3] S. Suzuki, “Integrated Navigation for Autonomous Drone in GPS and GPS-Denied Environments,” J. Robot. Mechatron., Vol.30, No.3, pp. 373-379, 2018.
- [4] M. Whitzer, J. Keller, S. Bhattacharya, and V. Kumar, “In-Flight Formation Control for a Team of Fixed-Wing Aerial Vehicles,” Proc. of 2016 Int. Conf. on Unmanned Aircraft Systems, pp. 372-380, 2016.
- [5] D. Floreano and R. Wood, “Science, technology and the future of small autonomous drones,” Nature, Vol.521, No.7553, pp. 460-466, 2015.
- [6] T. Ozaki and K. Hamaguchi, “Bioinspired Flapping-Wing Robot with Direct-Driven Piezoelectric Actuation and Its Takeoff Demonstration,” IEEE Robotics and Automation Letters, Vol.3, No.4, pp. 4217-4224, 2018.
- [7] J. James et al., “Liftoff of a 190 mg Laser-Powered Aerial Vehicle: The Lightest Wireless Robot to Fly,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 3587-3594, 2018.
- [8] J. Verboom et al., “Attitude and altitude estimation and control on board a Flapping Wing Micro Air Vehicle,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 5846-5851, 2015.
- [9] H. Phan et al., “Design and stable flight of a 21 g insect-like tailless flapping wing micro air vehicle with angular rates feedback control,” Bioinspiration and Biomimetics, Vol.12, No.3, pp. 1-18, 2017.
- [10] Z. Liu et al., “Electrostatic flapping-wing actuator with improved lift force by the pivot-spar bracket design,” Sensors and Actuators, A: Physical, Vol.280, pp. 295-302, 2018.
- [11] T. Fujikawa et al., “Development of A Lead-Lag Mechanism Using Simple Flexible Links for A Small Butterfly-Style Flapping Robot,” 2010 World Automation Congress, pp. 1-6, 2010.
- [12] T. Fujikawa et al., “Motion Analysis of Pitch Rotation Mechanism for Posture Control of Butterfly-style Flapping Robot,” American Trans. on Engineering and Applied Sciences, Vol.3, No.4, pp. 251-263, 2014.
- [13] Y. Ozawa et al., “Analysis of Turning Motion for Developing a Butterfly-Style Flapping Robot,” MM Science J., pp. 2198-2204, 2018.
- [14] T. Fujikawa et al., “Development of a Small Flapping Robot – Motion Analysis during Takeoff by Numerical Simulation and experiment –,” Mechanical Systems and Signal Processing (MSSP), Vol.22, No.6, pp. 1304-1315, 2008.
- [15] H. Liu and H. Aono, “Size effects on insect hovering aerodynamics: an integrated computational study,” Bioinspiration and Biomimetics, Vol.4, No.1, pp. 1-13, 2009.
- [16] N. Yokoyama et al., “Aerodynamic forces and vortical structures in flapping butterfly’s forward flight,” Physics of Fluids, Vol.25, No.2, doi: 10.1063/1.4790882, 2013.
- [17] R. Bomphrey et al., “Smart wing rotation and trailing-edge vortices enable high frequency mosquito flight,” Nature, Vol.544, No.7648, pp. 92-95, 2017.
- [18] H. Liu et al., “Aerodynamics and flight stability of a prototype flapping micro air vehicle,” Proc. of 2012 ICME Int. Conf. on Complex Medical Engineering, pp. 657-662, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.